Um guia para digitalização em ambientes difíceis
Hovermap Emesent utiliza a tecnologia de Localização e Mapeamento SimultâneosSLAM) para compreender a sua localização e gerar nuvens de pontos exactas. Após anos de investigação sobre a autonomia dos drones, o algoritmo SLAM da Emesenté altamente fiável em ambientes desafiantes subterrâneos e noutros locais onde o GPS não é utilizado. No entanto, SLAM difere da varredura a laser baseada em tripé, pois os resultados capturados são mais dependentes da identificação de caraterísticas no ambiente.
Túneis e bueiros são alguns dos ambientes mais desafiadores para os scanners SLAM . A falta de recursos nesses ambientes pode levar ao deslizamento SLAM , resultando em uma nuvem de pontos inconsistente que pode ser inutilizada para seu propósito final.
Nesta publicação, vamos orientá-lo na digitalização de um bueiro desafiante e indicar algumas dicas para garantir que obtém sempre o melhor resultado. Se quiser ver a nuvem de pontos que utilizámos neste guia, pode descarregar o conjunto de dados aqui.
Por Ryan Palfrey e Andrew Palmer
O QUE TORNA O BUEIRO DESAFIANTE?
O bueiro que estamos a analisar tem 130m de comprimento e é bastante estreito, com 3m de largura x 3,5m de altura.
O chão, o teto e as paredes são lisos e o ambiente em ambas as extremidades do canal é constituído principalmente por árvores e um riacho.


SLAM usa superfícies no ambiente para determinar onde o Hovermap está. As paredes, o piso e o teto do bueiro são excelentes caraterísticas que permitem que o Hovermap saiba exatamente onde está dentro da secção transversal do bueiro, mas não fornecem nenhuma informação sobre onde o Hovermap está ao longo do comprimento do bueiro.
Na ausência de quaisquer outras caraterísticas no ambiente, é muito provável que SLAM escorregue nesta direção.
DICAS PARA A RECOLHA DE DADOS EM AMBIENTES COM POUCOS RECURSOS
O melhor que pode fazer é segurar o Hovermap de modo a que possa ver ambas as extremidades do bueiro; por exemplo, segure o Hovermap para o lado.
Como não há elementos no bueiro que possam ser usados para determinar a sua posição ao longo do comprimento do bueiro, SLAM baseia-se em elementos em cada extremidade do bueiro. Garantir que ambas as extremidades sejam visíveis tanto quanto possível é fundamental para minimizar o risco de deslizamento SLAM .
Além disso, tenta posicionar-te de forma a que o Hovermap fique no centro do bueiro e evita movimentos rápidos ou bruscos.

Devido ao baixo número de caraterísticas no bueiro, é necessário evitar a introdução de caraterísticas negativas. As caraterísticas negativas são coisas no ambiente que podem confundir SLAM, como pessoas e veículos em movimento, água e neblina. Se precisar de ser acompanhado por alguém por razões de segurança, peça-lhe para andar no lado oposto ao do Hovermap , para que fique no ângulo morto e não contribua com caraterísticas negativas.
Se tudo o resto falhar, pode acrescentar as suas próprias caraterísticas aos ambientes. Por exemplo, coloque caixas de cartão grandes a cada 50 m ou mais. É necessário garantir que estas não se movem durante o exame, para que não se tornem elementos negativos.
PROCESSAMENTO DA DIGITALIZAÇÃO
Recolhemos imagens do bueiro em duas configurações:
- Segurar o Hovermap para o lado sem ninguém a seguir
- Hovermap anexado ao acessório da mochila com alguém a seguir
A primeira digitalização foi processada sem deslizes utilizando as predefinições do Aura.
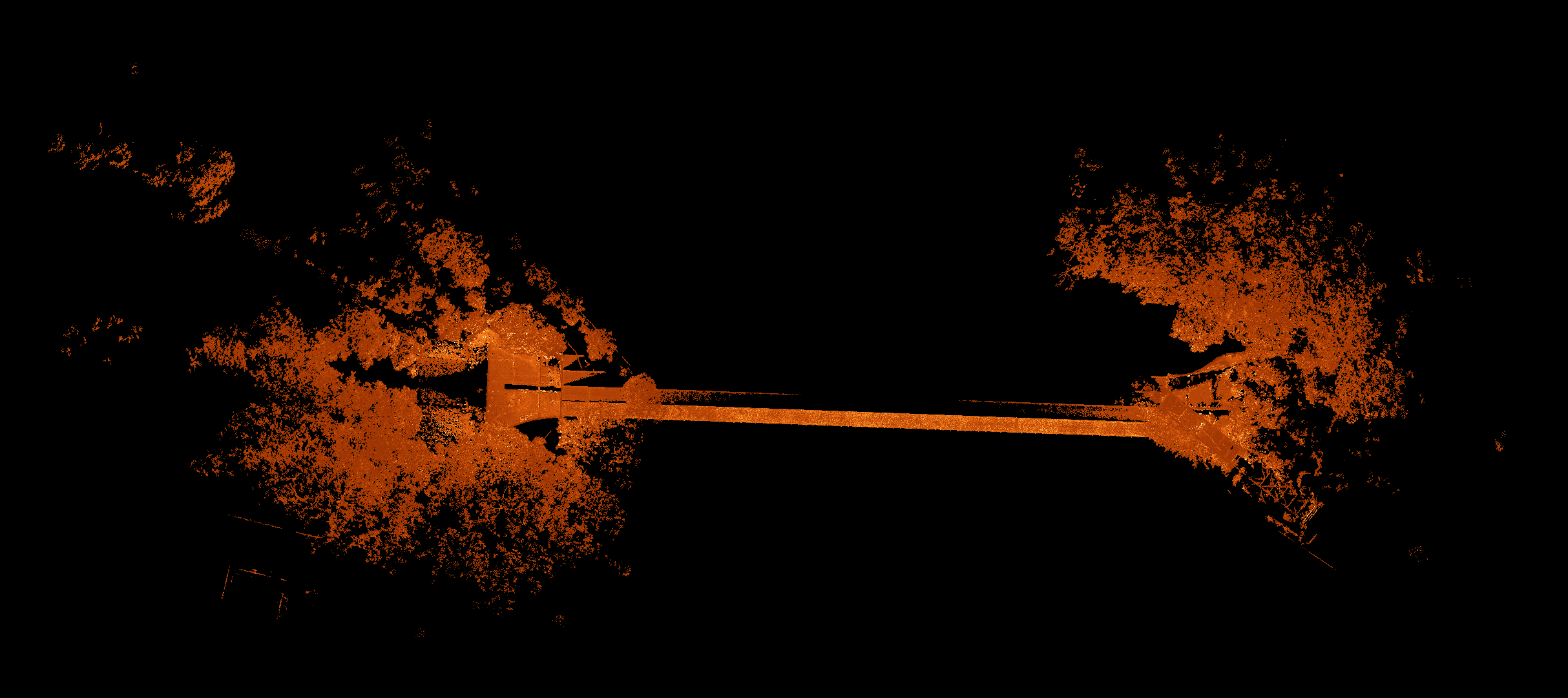
Os graffiti no túnel podem ser usados para mostrar que não houve deslizamento.

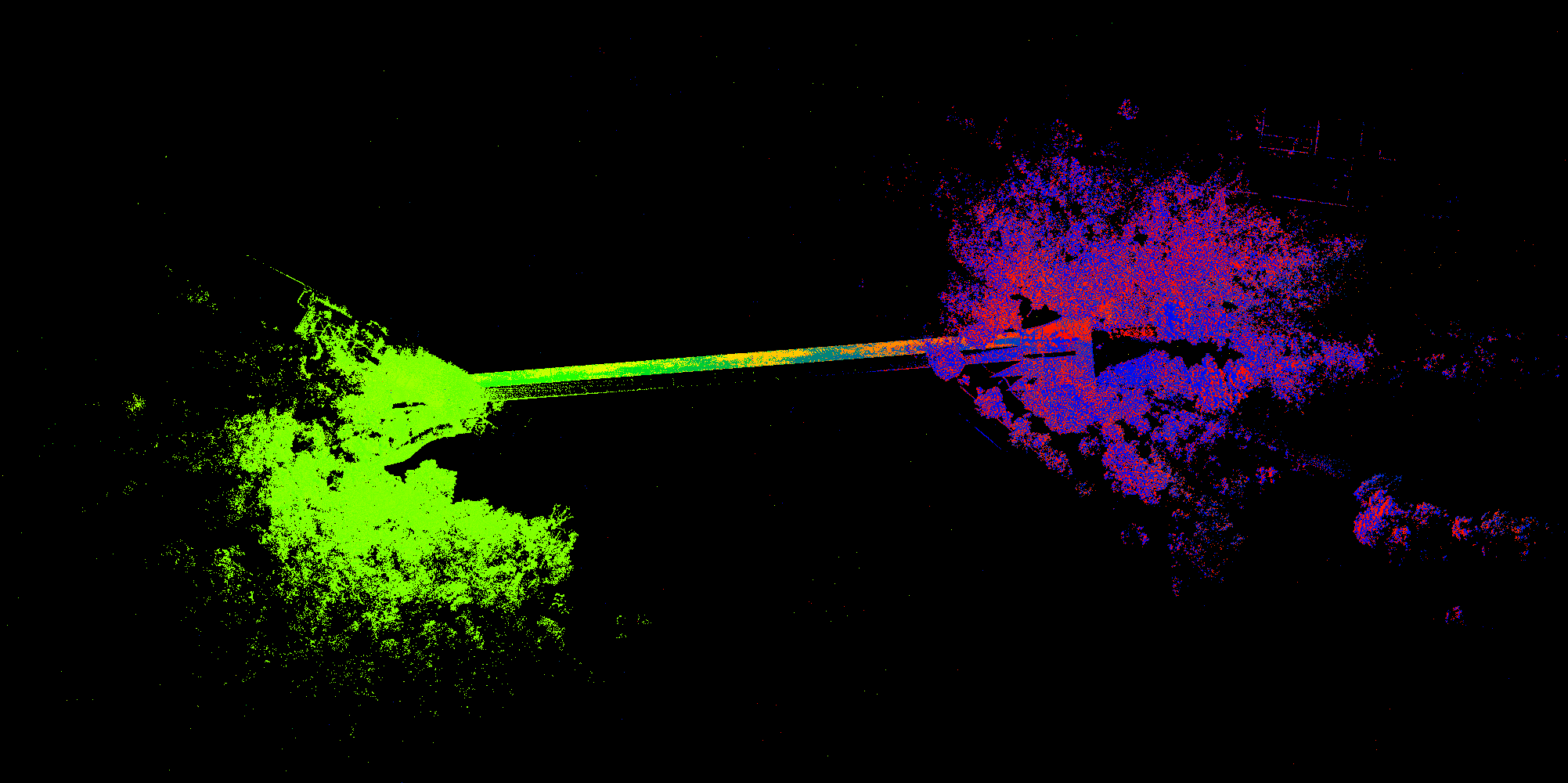
O segundo scan não foi processado sem deslizamento, utilizando as definições predefinidas, devido ao campo de visão restrito devido ao facto de estar montado na mochila e à adição de caraterísticas negativas da pessoa que o seguia. A coloração do scan por tempo destaca quando ocorreu o deslizamento SLAM . Na imagem tricolor, a digitalização começou no lado direito do bueiro, passou pelo bueiro e voltou. Na viagem de regresso, SLAM sofreu um deslizamento bastante acentuado e, como resultado, o fim do exame não está alinhado com o início do exame.
Esta imagem mostra o scan colorido por tempo (azul->verde->vermelho). As partes azul e vermelha do scan são o início e o fim, respetivamente, e devem estar alinhadas.

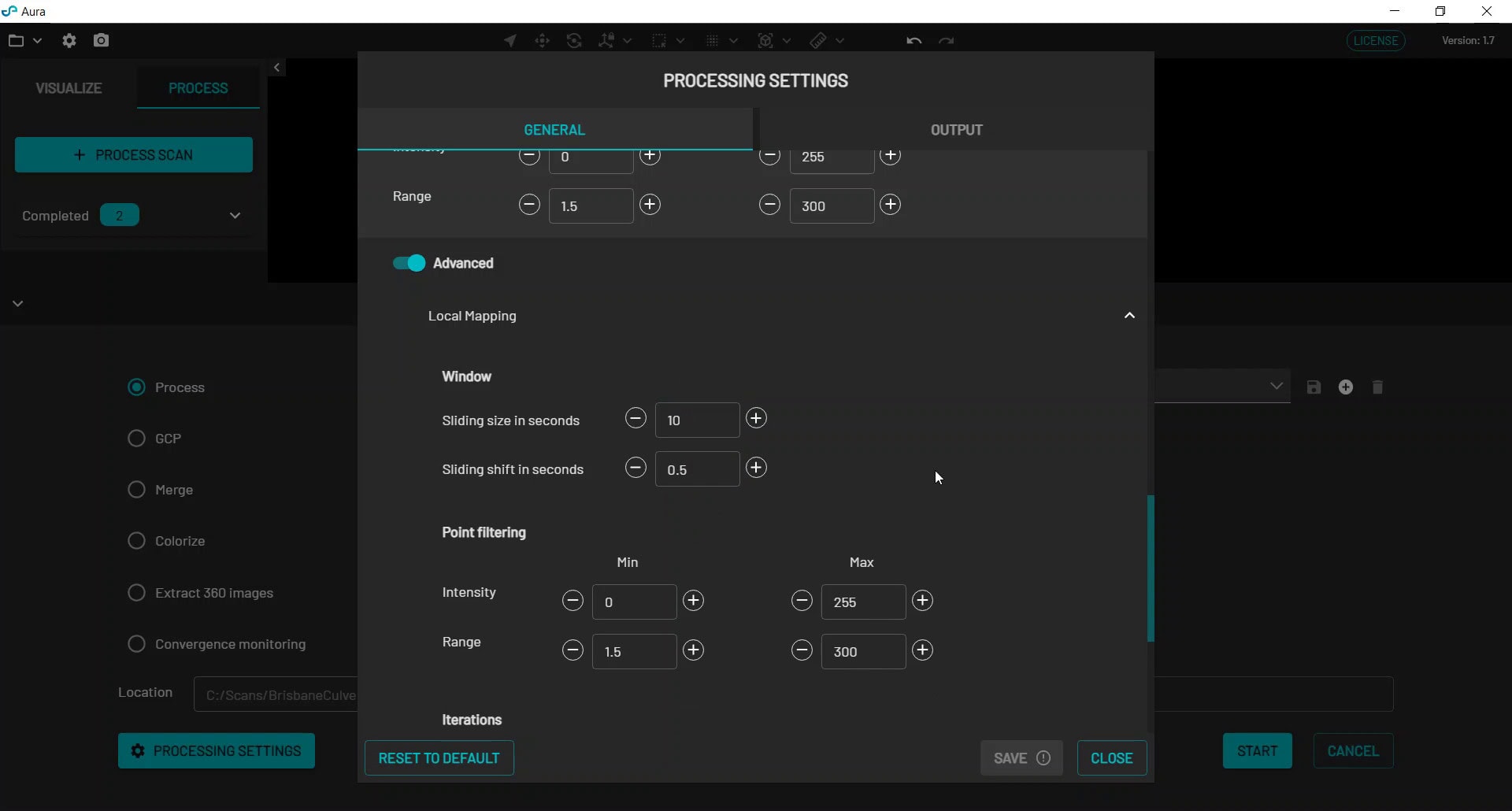
DEFINIÇÕES DE PROCESSAMENTO DA AURA
Existem algumas definições que podemos alterar na Aura que podem ajudar a reduzir o deslizamento.
Em Avançado->Mapeamento Local->Janela, altere o Tamanho do deslizamento em segundos do valor padrão de 5 para 10, e o Deslocamento do deslizamento em segundos do valor padrão de 1 para 0.5. Note que modificar estes valores desta forma aumenta o tempo de processamento de partes do pipeline SLAM em 4 a 5 vezes.
Com estas definições modificadas Aura , a digitalização é agora processada com êxito sem qualquer deslize e o início e o fim da digitalização estão perfeitamente alinhados.
Se, em qualquer altura, necessitar de aconselhamento sobre um exame difícil, não hesite em entrar em contacto connosco - teremos todo o prazer em ajudar.
Entretanto, se quiser ver a nuvem de pontos que utilizámos neste guia, pode descarregar o conjunto de dados aqui.
Recursos relacionados