厳しい環境でのスキャニングの手引き
Emesent Hovermap は、Simultaneous Localization and Mapping (SLAM) 技術を使用して位置を把握し、正確な点群を生成する。ドローンの自律性に関する長年の研究の結果、Emesent'のSLAM アルゴリズムは、地下などのGPSが使えない厳しい環境でも高い信頼性を発揮する。しかし、SLAM は三脚を使ったレーザースキャニングとは異なり、捕捉された結果は環境内の特徴の特定により大きく依存する。
トンネルや暗渠は、SLAM スキャナーにとって最も困難な環境のひとつである。このような環境では特徴がないため、SLAM スリップが発生し、その結果、点群に一貫性がなくなり、最終的な目的に使用できなくなる可能性があります。
この投稿では、困難な暗渠のスキャンについて説明し、毎回最良の結果を得るためのヒントを示します。このガイドで使用した点群データをご覧になりたい場合は、こちらからダウンロードできます。
ライアン・パルフリー&アンドリュー・パーマー
暗渠の何が難しいのか?
私たちがスキャンしている暗渠は長さ130mで、幅3m×高さ3.5mとかなり狭い。
床も天井も壁も滑らかで、暗渠の両端の環境は主に樹木と小川で構成されている。


SLAM は、Hovermap がどこにいるかを判断するために、環境内の表面を使用する。暗渠の壁、床、天井は、Hovermap が暗渠の断面内のどこにいるかを正確に知ることができる優れた機能であるが、Hovermap が暗渠の長さに沿ってどこにいるかという情報は提供しない。
環境に他の特徴がない場合、SLAM 、この方向にスリップする可能性が非常に高い。
低機能環境でデータを収集するためのヒント
一番良いのは、Hovermap 、暗渠の両端を見ることができるようにすることです。例えば、Hovermap 、横から見るようにします。
暗渠内には、暗渠の長さに沿ってその位置を決定するために使用できる特徴がないため、SLAM 、代わりに暗渠の両端の特徴に頼ることになる。両端ができるだけ見えるようにすることが、SLAM スリップのリスクを最小化する鍵である。
さらに、Hovermap が暗渠の中央に来るように位置を決め、速い動きやぎこちない動きは避けるようにする。

暗渠内の特徴の数が少ないため、負の特徴の導入は避けたい。ネガティブな特徴とは、SLAM 、動いている人や車、水、霧など、混乱させる可能性のある環境中のものである。安全上の理由から同伴者が必要な場合は、Hovermap と反対側を歩いてもらい、死角になるようにして、ネガティブな特徴を与えないようにします。
万策尽きたら、環境に独自の特徴を加えることもできる。例えば、大きな段ボール箱を50メートルおきくらいに置く。負の特徴にならないよう、スキャン中にこれらが動かないようにする必要がある。
スキャン処理
暗渠のスキャンを2つの構成で収集した:
- Hovermap 、誰もついてこない。
- Hovermap バックパックの付属品には、次のような人が付いている。
最初のスキャンは、Aura のデフォルト設定を使用して、スリップなしで処理された。
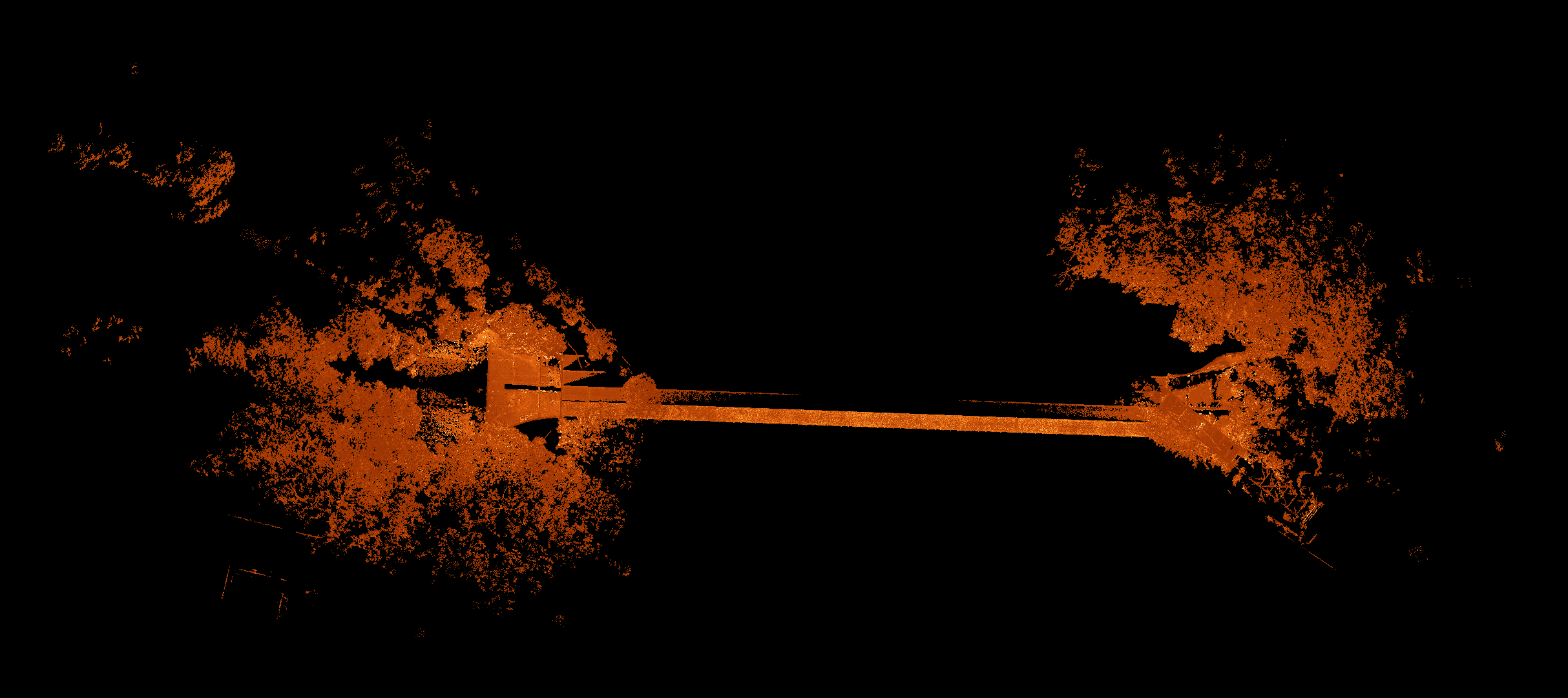
トンネル内の落書きは、スラムスリップがなかったことを示すのに使える。

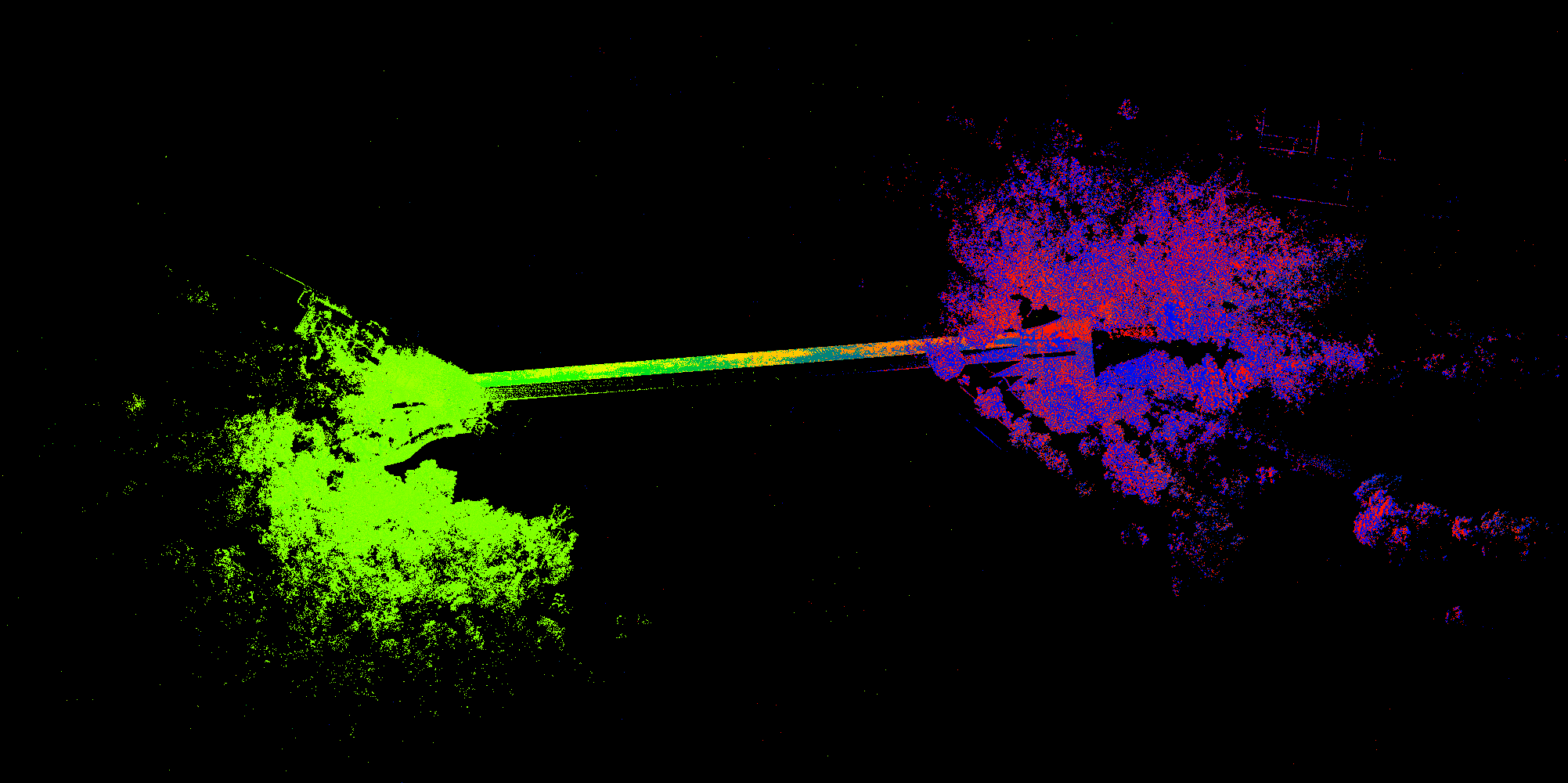
2回目のスキャンでは、バックパックに装着されていたため視野が制限され、さらに後続者のネガティブな特徴が加わった結果、デフォルトの設定ではスリップせずに処理されなかった。スキャンを時間ごとに色分けすると、SLAM スリップが発生したタイミングが強調される。この3色画像では、スキャンは暗渠の右側から始まり、暗渠を通って再び戻ってきた。復路では、SLAM 、かなり劇的にスリップしており、その結果、スキャンの終わりと始まりが一致していない。
この画像はスキャンを時間ごとに色分けしたものである(青→緑→赤)。スキャンの青と赤の部分はそれぞれ開始と終了であり、一直線上に並ぶはずである。

オーラ処理設定
Aura 、スラムスリップを軽減するために変更できる設定がいくつかある。
Advanced->Local Mapping->Window で、Sliding size (秒)をデフォルト値の5から10に、Sliding shift (秒)をデフォルト値の1から0.5に変更する。これらの値をこのように変更すると、SLAM パイプラインの一部の処理時間が 4 ~ 5 倍長くなることに注意してください。
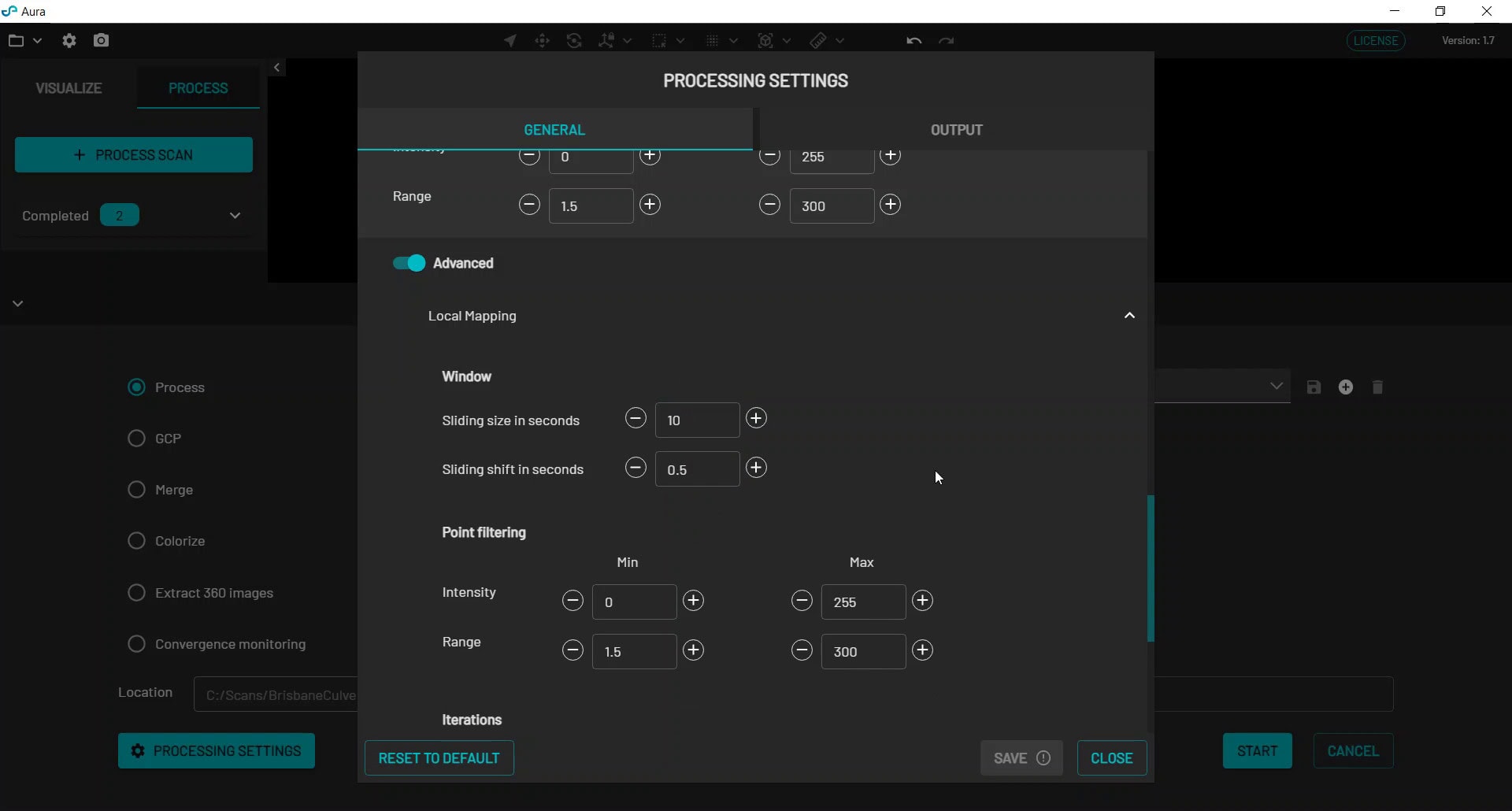
これらの変更されたAura の設定により、スキャンはスリップすることなく正常に処理され、スキャンの開始と終了は完全に一直線に並ぶようになった。
難しいスキャンについてアドバイスが必要な場合は、遠慮なくご連絡ください。
このガイドで使用した点群データをご覧になりたい方は、こちらからダウンロードできます。