-
インフラストラクチャーの現状と進捗モニタリング
迅速かつ正確な3D as-builtでインフラと建設プロジェクトを加速する
-
建設ライフサイクル全体を通じた効率的で正確なデータ取得
インフラや建設プロジェクトの建設進捗をモニタリングすることは、スケジュールの遅延やコスト増につながる潜在的な問題を早期に発見するために不可欠です。しかし、リアルタイムで進捗状況を把握することは困難であり、予期せぬ遅延や合併症を引き起こす可能性があります。同様に重要なのがas-builtの取得です。as-builtは、最終的な工事の正確な記録を提供し、設計と現実のギャップを埋め、将来の計画、コンプライアンス、安全性のための信頼できる参考資料となります。しかし、正確なデータを取得するのが複雑なため、これらも困難であり、不完全な文書になることが多い。
現代のインフラや建設プロジェクトの需要に対応するためには、より適応性が高く、統合されたテクノロジー・ソリューションが必要である。
複雑な建設環境への挑戦
インフラや建設プロジェクトのライフサイクルを文書化するための既存のデータ収集技術は、文書化プロセスの正確性、効率性、完全性に影響を与える重大な課題に直面している。手作業による調査や2D図面などの従来の方法では、複雑なプロジェクトに必要な精度が不足しており、不正確で不完全なas-builtが発生する。
地上レーザースキャナー(TLS)は高い精度と正確さを提供しますが、このアプローチは、特に建設が迅速に進む大規模な現場や入り組んだ現場では、時間がかかることがあります。事前の計画が必要で、交通の迂回が必要になることもあり、非常にコストがかかります。また、機器の設置や再配置を何度も行わなければならないため、プロジェクトのスケジュールが延び、重要な情報の入手が遅れます。さらに、高所や狭い場所など、手が届きにくい場所や危険な場所でデータを取得することが困難な場合、最終的な文書にギャップが生じたり、設計に使える成果物の作成にかかる時間が大幅に増えたりする可能性があります。さらに、TLSの操作には経験豊富なサーベイヤーのスキルが必要なため、サーベイヤーの稼働率に依存することになります。
-
Emesent ソリューション
Emesent Hovermap は、精度とスピードの両方を兼ね備えており、工事進捗状況の監視や竣工時のドキュメント作成のための詳細な3D データを、従来の方法の数分の一の時間で、しかも大規模なトレーニングを必要とせずに、迅速に取得することができます。高度なSLAM アルゴリズムと連続スキャン機能を活用し、Hovermap は、インフラや建設プロジェクトの需要に理想的なソリューションを提供します。
1台のデバイスで多面的なデータキャプチャ機能を提供するHovermap は、多様な展開オプションを提供する。DJI M350またはFreefly Astro ドローンに搭載して高速空撮を行ったり、車両に取り付けて広域を迅速にカバーしたり、バックパックに搭載して手の届きにくい場所にアクセスしたりと、環境に応じてエリアを飛行、運転、歩行することができます。この多用途性により、環境に最適なキャプチャ方法を採用しながら、混乱やエリアのシャットダウンを最小限に抑えることができる。スキャンは簡単に統合でき、最終的な1つの出力を作成できます。
さらに、HovermapのRTK統合により、ジオリファレンスとドリフト補正が自動化され、地上基準点の配置やジオリファレンスを行うことなく、高速かつ正確で高精度なスキャンを実現します。RTKとSLAM の両方をインテリジェントに活用して結果を最適化することで、RTKは最も信頼性が高く、堅牢な点群を確保し、GCPなしで屋外から屋内までシームレスにジオリファレンスされたスキャンを実現します。Hovermap 用の360 colorization キットと組み合わせることで、新たなレベルのリアリティを追加し、360 度画像を抽出してコンテキストを追加できます。
取得したデータは、RevitのようなBIMツールに簡単にエクスポートでき、プロジェクトのライフサイクルを通じて継続的な更新やメンテナンスが可能です。
-
迅速なデータ収集
従来の方法より少なくとも10倍速いデータキャプチャにより、設計との比較のための定期的なスキャンが可能。
-
ワークフローの高速化
自動化されたターゲット検出とジオリファレンスにより、各コントロールポイントに触れる必要がなく、連続スキャンとノンストップの画像キャプチャが可能。
-
正確な結果
壁、天井、床、MEP、HVACシステムなど、正確な3D 空間データと複雑な構造詳細をキャプチャします。
-
使いやすさ
ユーザーは大規模なトレーニングを受けることなく、数分で正確なデータを取得することができます。
-
多彩な展開
マルチプラットフォーム展開オプションにより、大規模環境からアクセスしにくい場所まで、環境に最適なデータキャプチャ方法を確保
-
競争力の向上
より迅速なデータ収集により、より多くの仕事を短時間で完了させることができます。
-
-
運用ワークフロー
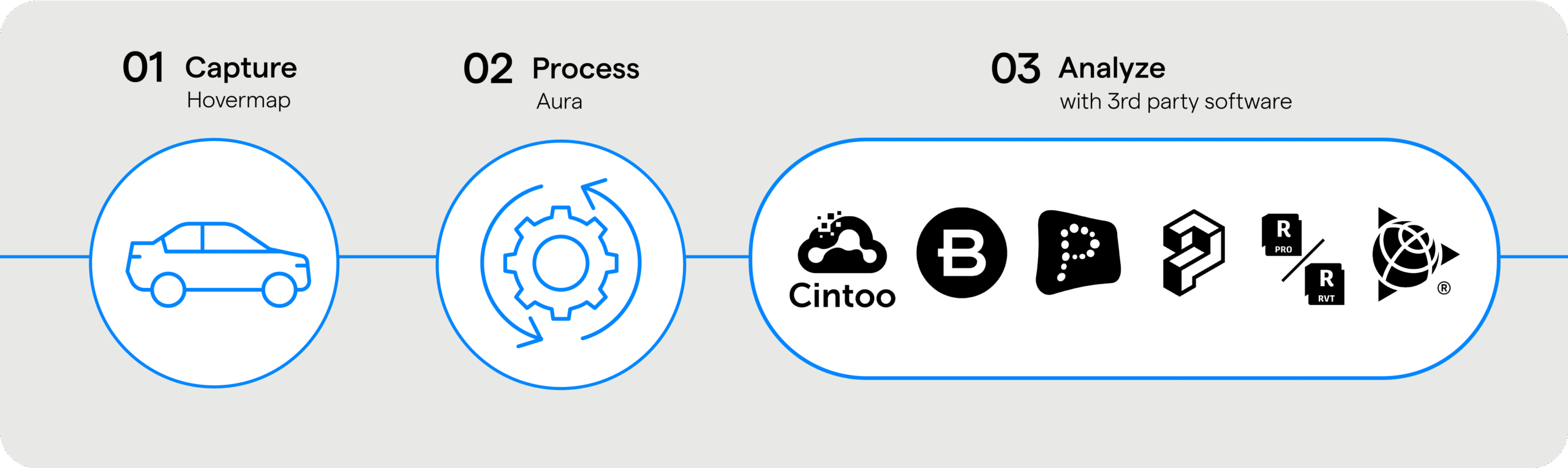
- 車両、ドローン、バックパックにHovermap 展開。
- 処理、RTKまたはGCPによるAura データセットの自動ジオリファレンス、マージ、クリーン、準備。
- サードパーティツール(Cintoo、Bentley、Pointerra、Prevu3D、Recap/Revit、Trimble Business Centre)に簡単にインポートして、進捗状況を監視、追跡し、実際の設計と比較することができます。
-
as-builtモデリングのための迅速で正確な3D データキャプチャ
複雑な環境を迅速、正確、継続的にデータ収集することで、競争力を高めます。
-

RTK対応
高速、高精度、再現性のある結果で、広いエリアや長い直線的な資産を確実にスキャンし、GCPの必要性を低減または排除します。
-

自動ジオリファレンスとドリフト補正
労働集約的で時間のかかるプロセスを排除
-

多彩な展開
プラグアンドプレイ設計により、ハンドヘルド、ドローン、車両、ポールへの取り付け、ケージへの収納、バックパックへの取り付けなど、プラットフォームの切り替えが容易。
-

スキャンしながらストリーム
Commander アプリによるリアルタイム3D 環境の可視化
-

360 colorization 360画像キャプチャ
点群にコンテキストを追加し、関心のある領域を強調表示します。
-

アンケートの採点結果
クラス最高のSLAM 、自動ジオリファレンスと組み合わせることで、RTKが利用できない場所での結果をさらに強化します。
-

ソフトウェアの統合
Autodesk Recap - RevitおよびBentley Point Toolsを含む標準CADパッケージへのインポート
-

セット・アンド・ゲット・プロセッシング
環境から動くものを取り除くことを含む自動クリーニングツールで
-
-
ケーススタディ
ブライアリー・アソシエイツ、道路トンネルの点検をスピードアップ
ブライアリー・アソシエイツは、点検チームの安全を確保しつつ、交通の混乱を軽減するトンネル点検のソリューションを求めていた。
ブライアリー・アソシエイツは、現場検査員が長さを歩いてメモや写真を取り、少なくとも6時間の通行止めを必要とする典型的なトンネル検査方法を用いる代わりに、Hovermap 、2車線、125.2m(410.8フィート)のトンネルを1時間の検査で検査した。
-
もっと見たい?
今すぐ問い合わせる