Aumento de la toma de decisiones en primera instancia con datos de 3D LiDAR
Uno de los principales objetivos de la policía y de los equipos de intervención inmediata -especialmente en Estados Unidos en los dos últimos años- ha sido prepararse para situaciones en las que haya un agresor activo. Estos incidentes, a menudo trágicos, ocurren en escuelas, lugares donde se celebran eventos especiales, iglesias y sinagogas, y edificios gubernamentales, y aparecen en las noticias todos los días.
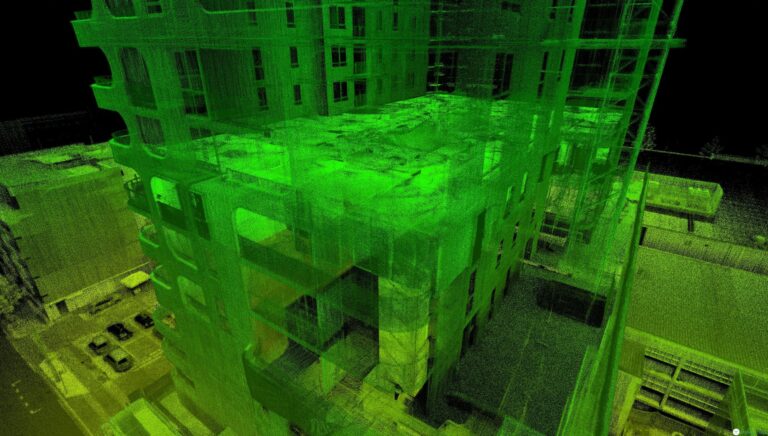
Uno de los principales retos a los que se enfrentan los primeros intervinientes en estos escenarios es comprender la disposición del lugar. Emesent Hovermap es una potente solución para modelar entornos difíciles, tanto interiores como exteriores. El uso de 3D LiDAR para cartografiar interiores y exteriores de edificios crea "planos" gemelos digitales muy detallados de un lugar, que proporcionan información y conocimiento de la situación a los diversos organismos que colaboran durante incidentes con asaltantes activos.
A principios de año, Emesent organizó una demostración en Bethesda (Maryland, EE.UU.). El equipo, que en un principio iba a realizar la demostración en un centro escolar, se trasladó a un lugar de celebración de eventos especiales con un perfil igual de exigente.
Strathmore Hall es un entorno complejo con diferentes entradas y salidas en varios niveles. La demostración se coordinó a través del Departamento de Policía de Montgomery, que abrió el local a otros organismos interesados, con asistentes que representaban a cinco municipios diferentes de diversos departamentos funcionales, desde medicina forense hasta artificieros y operaciones tácticas.
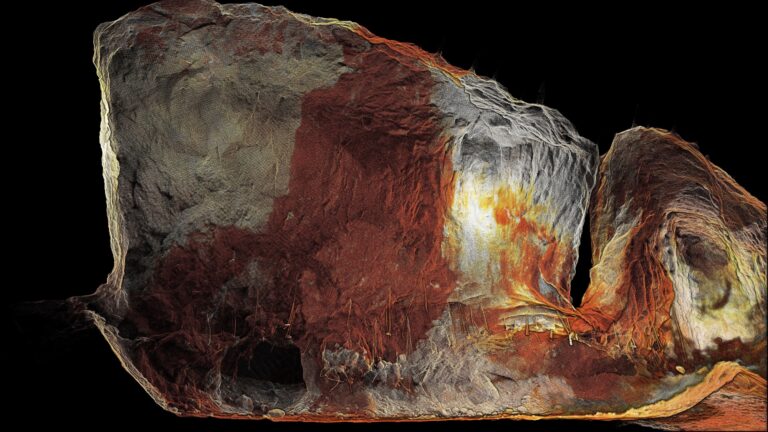
Sobre el terreno, el equipo de Emesent escaneó el edificio y generó rápidamente un modelo detallado de 3D . Esto se complementó con un robot Boston Dynamics Spot® que proporcionó imágenes reales en tiempo real desde el interior del vestíbulo.
El objetivo era compartir información y oportunidades con todas las distintas disciplinas presentes. El equipo comenzó con un ejercicio de reconstrucción de accidentes. Mientras se realizaban las demostraciones, los agentes tuvieron ocasión de utilizar los sistemas de primera mano.
El concepto de "reconstrucción de colisiones" reflejaba los intereses de los participantes en la manifestación. Podían trasladar la reconstrucción de colisiones o accidentes a los muchos ámbitos diferentes en los que se centraban individualmente.
Por ejemplo, la policía reconoció que con Hovermap podía captar rápidamente la escena del accidente y registrar las dimensiones, creando así un registro digital procesable.
Con la rapidez y precisión de la captura de datos de Hovermap's 3D , la policía de tráfico podría reabrir mucho antes las principales arterias tras un accidente, reduciendo así las molestias al público y el coste económico para la comunidad.
Poder evitar la contaminación de una escena -así como registrar automáticamente los cambios durante el examen de una escena muy compleja- era crucial para la recogida de pruebas.
Hovermapayuda a preservar las pruebas de una forma que otros sistemas no consiguen. Los agentes consideraron que podrían responder de forma inmediata y autónoma sin alterar las pruebas, reducir el tiempo de permanencia en el lugar de los hechos y reducir el número de personas que entran en él.
Se reconoció que Hovermap también proporcionaría un rápido conocimiento de la situación. Los agentes podrían despejar la escena del crimen con mayor rapidez y llegar a posibles pruebas ocultas en lugares difíciles.
Durante la demostración, varios agentes de las fuerzas del orden utilizaron Hovermap para capturar de forma rápida y precisa la imagen de un vehículo y, a continuación, visualizar los datos en un plazo muy breve. Los agentes consideraron que la rapidez en la recopilación de información les beneficiaría, y que el uso de Hovermap aumentaba la seguridad de los agentes en el lugar. Preservación de pruebas, análisis rápido y toma de decisiones de forma segura.
Para demostrar la autonomía sin GPS, el equipo utilizó un robot Boston Dynamics Spot®. Dado que los departamentos de policía despliegan drones constantemente, era fundamental ver cómo la solución de Emesentpodía integrarse perfectamente en sus flujos de trabajo con un dron (o robot).
Por último, la posibilidad de integrar otros sensores para obtener fuentes de datos adicionales -como sensores de gas y otros detectores- era algo que los agentes de la ley estaban deseando explorar.
Para obtener más información sobre la demostración y otros casos de uso en seguridad pública y defensa, vea el vídeo Potente apoyo a la toma de decisiones con información basada en datos o póngase en contacto con nuestro equipo.

*
¿Ha oído hablar de nuestro programa de adopción anticipada para Hovermap en el robot Boston Dymanics Spot ?
Inscríbase en una demostración para explorar su caso de uso único.
Recursos relacionados