Como um drone autónomo mapeou um As-built completo de uma ponte - incluindo a parte de baixo
A cerca de 24 quilómetros do interior de Seattle, ao longo de uma estrada de serviço público na região da madeira, encontra-se uma ponte de aço que era aparentemente impossível para os operadores autónomos de drones captarem numa análise completa como construída.
A cidade de Seattle, proprietária da ponte e do terreno, tem estado a analisar diferentes sistemas de digitalização LiDAR para ajudar a manter as suas propriedades e os bens nelas existentes. Escolheram esta ponte para as demonstrações de produtos, uma vez que é um dos seus bens mais difíceis de capturar para digitalização as-built, dando aos demonstradores todas as oportunidades de mostrar as suas capacidades.
Atravessando um desfiladeiro, a ponte de tabuleiro gradeado e tubagem tem cerca de 100 pés (30 metros) de comprimento e, no seu ponto mais alto, situa-se a cerca de 150 pés (50 metros) de altura sobre margens íngremes, árvores altas e um rio corrente.
Depois de oito demonstrações, a equipa da cidade de Seattle continuava à procura da solução, uma vez que todas as tentativas anteriores não tinham conseguido captar uma imagem desta ponte de todos os ângulos, alegando os fornecedores de demonstrações que o ambiente era demasiado difícil. A ponte de aço poderia interferir com o drone, não estavam dispostos a voar debaixo da ponte ou simplesmente não queriam correr o risco de danificar o seu equipamento. Foi então que apareceram Ryan McNicholas e Adam Hargraves da Emesent com o Hovermap.
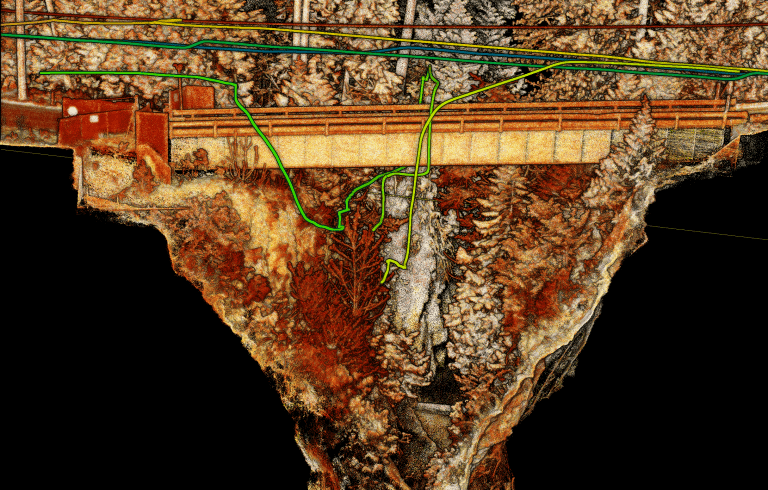
Utilizando o modo Pilot Assist do Hovermap, que permite evitar colisões omnidireccionais, capacidade de voo sem GPS e controlo de estabilidade, Adam conseguiu dar uma volta completa à ponte. O tabuleiro gradeado da ponte permitiu-lhes manter sempre o contacto visual com o drone, de acordo com os regulamentos da FAA (Administração Federal de Aviação dos EUA).
Um outro desafio foi colocado por uma árvore suspensa sob a ponte que não era visível durante uma inspeção visual. Durante o voo, a Deteção de Obstáculos do Hovermapidentificou a árvore e a funcionalidade de Evitar Colisões assumiu o controlo do drone e alterou a trajetória de voo para contornar a árvore em segurança.
A adição Hovermap a um drone cria um drone autónomo e uma bolha de segurança, protegendo o equipamento e o bem e proporcionando a confiança e a estabilidade para um voo próximo.
A digitalização completa da ponte, com a duração de cinco minutos, fornece à equipa da cidade de Seattle uma imagem 3D completa da ponte, incluindo a parte inferior do tabuleiro, e permitir-lhes-á efetuar medições e produzir um modelo BIM. A digitalização também fornecerá uma linha de base para comparação com futuras digitalizações para monitorização do estado, verificações de integridade estrutural e identificação de áreas de manutenção.
Veja como Hovermap é utilizado para inspecções completas de pontes pela GeoZICHT, uma empresa de consultoria geodésica dos Países Baixos, neste estudo de caso.
Recursos relacionados