Cómo un dron autónomo cartografió por completo un puente, incluidos sus bajos
A unos 24 kilómetros de Seattle, en el interior, por una carretera de servicio público en una zona maderera, hay un puente de acero que parecía imposible que los operadores autónomos de drones pudieran capturar en un escáner completo tal y como estaba construido.
La ciudad de Seattle, propietaria del puente y del terreno, ha estado estudiando diferentes sistemas de escaneado en LiDAR para ayudar a mantener sus propiedades y los activos que hay en ellas. Eligieron este puente para las demostraciones de productos, ya que es uno de sus activos más difíciles de capturar para el escaneado as-built, dando a los demostradores todas las oportunidades para mostrar sus capacidades.
El puente de tablero enrejado y tuberías, que atraviesa un desfiladero, mide unos 30 metros de largo y, en su punto más alto, se eleva unos 50 metros sobre orillas escarpadas, árboles altos y un río caudaloso.
Tras ocho demostraciones, el equipo de la ciudad de Seattle seguía buscando la solución, ya que todos los intentos anteriores habían fracasado a la hora de capturar un escaneado de este puente desde todos los ángulos, alegando los proveedores de las demostraciones que el entorno era demasiado difícil. El puente de acero podía interferir con el dron, no estaban dispuestos a volar bajo el puente o simplemente no se arriesgaban a dañar sus equipos. Entonces llegaron Ryan McNicholas y Adam Hargraves de Emesent con Hovermap.
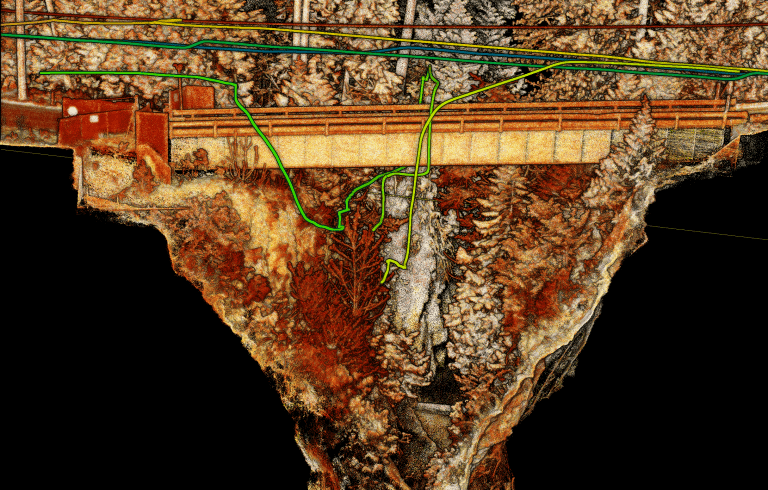
Utilizando el modo Pilot Assist de Hovermap, que proporciona evasión de colisión omnidireccional, capacidad de vuelo sin GPS y control de estabilidad, Adam pudo volar una vuelta entera del puente. La cubierta enrejada del puente les permitió mantener el contacto visual con el dron en todo momento, de acuerdo con la normativa de la FAA (Administración Federal de Aviación de Estados Unidos).
Otro desafío fue un árbol que sobresalía por debajo del puente y que no era visible durante la inspección visual. Durante el vuelo, la detección de obstáculos de Hovermapidentificó el árbol, y la función de prevención de colisiones tomó el control del dron y cambió la trayectoria de vuelo para rodear el árbol con seguridad.
Si se añade Hovermap a un dron, se crea un dron autónomo y una burbuja de seguridad, que protege el equipo y el activo y proporciona la confianza y estabilidad necesarias para un vuelo cercano.
El escaneado completo del puente, de cinco minutos de duración, proporciona al equipo de la ciudad de Seattle una imagen completa del puente en 3D , incluida la parte inferior del tablero, y les permitirá tomar medidas y elaborar un modelo BIM. El escaneado también proporcionará una base de comparación con futuros escaneados para la supervisión del estado, la comprobación de la integridad estructural y la identificación de áreas de mantenimiento.
Vea cómo utiliza Hovermap para inspecciones completas de puentes GeoZICHT, una consultoría geodésica de los Países Bajos, en este estudio de caso.
Recursos relacionados