Más allá de la superficie: El innovador enfoque de Emesentpara la vigilancia de la convergencia en minas subterráneas
La supervisión del desplazamiento y el movimiento de la roca en la minería subterránea es fundamental para la seguridad y la eficacia operativa. Los métodos tradicionales suelen carecer de cobertura y precisión. Emesent ha introducido una solución avanzada que utiliza sistemas basados en LiDAR y SLAM para mejorar la supervisión de la convergencia en minas subterráneas.
Emesent cofundador y CTO, Dr Farid Kendoul, explora cómo el equipo de Emesent aplicó esta tecnología para mejorar la precisión de los datos y agilizar el proceso de supervisión, ofreciendo un enfoque más eficaz para identificar y gestionar posibles problemas.
Por el Dr. Farid Kendoul
UNA SOLUCIÓN NOVEDOSA A LOS PROBLEMAS HABITUALES DEL METRO
La minería subterránea plantea retos únicos, sobre todo a la hora de controlar el desplazamiento y el movimiento de las rocas, que pueden acarrear graves consecuencias, como lesiones y costosos retrasos en la producción, especialmente a medida que las minas se hacen más profundas.
Los métodos tradicionales, como la cartografía de daños, los extensómetros y las estaciones totales, tienen sus ventajas, pero a menudo se quedan cortos en cuanto a cobertura, precisión y frecuencia. LiDAR La tecnología de cartografía3D ofrece una alternativa superior para la supervisión de la convergencia, ya que proporciona cobertura y una rica perspectiva del movimiento y la deformación de la roca en los túneles subterráneos. Sin embargo, para que la supervisión sea eficaz, los dos escaneados (el de referencia y el nuevo) deben alinearse con precisión para detectar pequeños movimientos y cambios (por ejemplo, un movimiento o cambio de 20 mm). Los errores de alineación o de escaneado pueden dar lugar a interpretaciones incorrectas de la deformación o la convergencia.
En la actualidad, se utilizan dos métodos principales de exploración LiDAR para la supervisión de la convergencia subterránea:
1. Escáneres terrestres LiDAR (TLS)
Los sistemas TLS proporcionan datos muy precisos 3D . Cuando se combinan con puntos de control terrestre, pueden construir un modelo 3D preciso de grandes áreas. Sin embargo, el proceso manual de recopilación de datos requiere mucho tiempo, a menudo días, para cubrir kilómetros de túneles y preparar los datos, lo que limita su uso a zonas críticas pequeñas.
2. Escáneres móviles basados en SLAM
Estos escáneres captan grandes zonas subterráneas de forma eficaz en cuestión de horas. Sin embargo, los sistemas SLAM pueden introducir imprecisiones (deriva) en el mapa 3D . Algunas minas solucionan este problema escaneando zonas pequeñas o dividiendo los escaneos grandes en secciones más pequeñas y utilizando software de terceros y pasos manuales para una alineación rígida, lo que lleva mucho tiempo y limita su adopción generalizada.
Ambos métodos se basan en la "transformación rígida" para alinear los escaneados de referencia y los nuevos. Este proceso implica mover y girar la nueva exploración para ajustarla a la exploración de referencia utilizando métodos como el ICP (Iterative Closest Point). En la alineación rígida, tanto la exploración de referencia como la nueva permanecen inalteradas, ajustándose únicamente su ubicación y orientación (transformación). Aunque este enfoque funciona bien en condiciones ideales en las que los escaneados son muy precisos y las únicas diferencias son los cambios ambientales, no es adecuado para entornos a gran escala como kilómetros de túneles. En tales casos, las imprecisiones inherentes y las posibles desviaciones en las exploraciones provocan desalineaciones, lo que da lugar a errores en la detección de las deformaciones reales y la convergencia.
El equipo de Emesent asumió el reto de desarrollar un nuevo sistema de control de la convergencia que combinara las ventajas de los sistemas basados en LiDAR SLAM sin las limitaciones antes mencionadas. Su innovador enfoque aprovecha las ventajas de LiDAR y SLAM para realizar un escaneado eficiente de grandes áreas, mejorado con novedosos algoritmos para alinear automáticamente escaneados extensos y ofrecer resultados precisos.
El núcleo del sistema de control de la convergencia de Emesentes su avanzada tecnología SLAM , que permite la alineación no rígida (elástica o flexible) de escaneos de gran tamaño que pueden presentar desviaciones, manteniendo al mismo tiempo la precisión local para la convergencia y la detección de cambios.
UN ENFOQUE MÁS EFICAZ DE LA SUPERVISIÓN DE LA CONVERGENCIA
Emesentcombina la tecnología móvil de captura rápida SLAM con un flujo de trabajo de procesamiento más rápido, sencillo y repetible. Esto permite a los operadores mineros escanear excavaciones en una zona más amplia con mayor regularidad y supervisar los cambios con datos cuantitativos precisos.
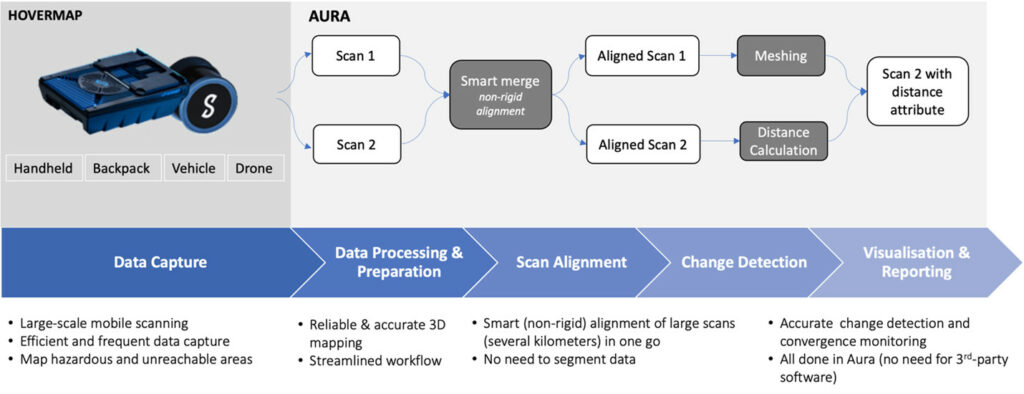
La solución combina dos productos principales de Emesent :
1. Una carga útil Hovermap desplegada a través de un vehículo, mochila, dron o dispositivo portátil para escanear casi cualquier zona bajo tierra de forma eficiente o incluso autónoma.
2. Aura software de escritorio para el tratamiento de datos brutos, la alineación inteligente de las exploraciones, la comparación de las exploraciones y el cálculo del cambio, la visualización de los resultados y muchas otras operaciones útiles. La mayoría de estos flujos de trabajo están automatizados y requieren una mínima intervención del usuario.
OFRECER INFORMACIÓN PRÁCTICA A TRAVÉS DE LA INNOVACIÓN
Emesentrepresenta un gran avance en la monitorización geotécnica, ya que aprovecha las capacidades avanzadas de la tecnología Wildcat SLAM para la alineación inteligente y no rígida (elástica y flexible) de las exploraciones. En este innovador enfoque, la primera exploración se utiliza como referencia y permanece inalterada, mientras que la segunda se somete a modificaciones elásticas para alinearse localmente con la exploración de referencia mediante una transformación no rígida. Este proceso se basa en la identificación y correspondencia precisas de las características de 3D en ambas exploraciones, teniendo en cuenta de forma eficaz las desviaciones y los errores. Esta alineación local es esencial para detectar con precisión los cambios y controlar la convergencia en zonas extensas y túneles captados eficazmente por un sistema cartográfico móvil SLAM .
Este método permite la alineación precisa de exploraciones extensas, como kilómetros de túneles subterráneos, logrando un alto nivel de precisión y eliminando al mismo tiempo la necesidad del tedioso proceso de segmentación de datos que suele utilizarse para ajustar la deriva de la exploración. En consecuencia, permite detectar deformaciones y cambios de tan sólo 5 mm en zonas específicas y de hasta 15 mm en entornos subterráneos típicos.
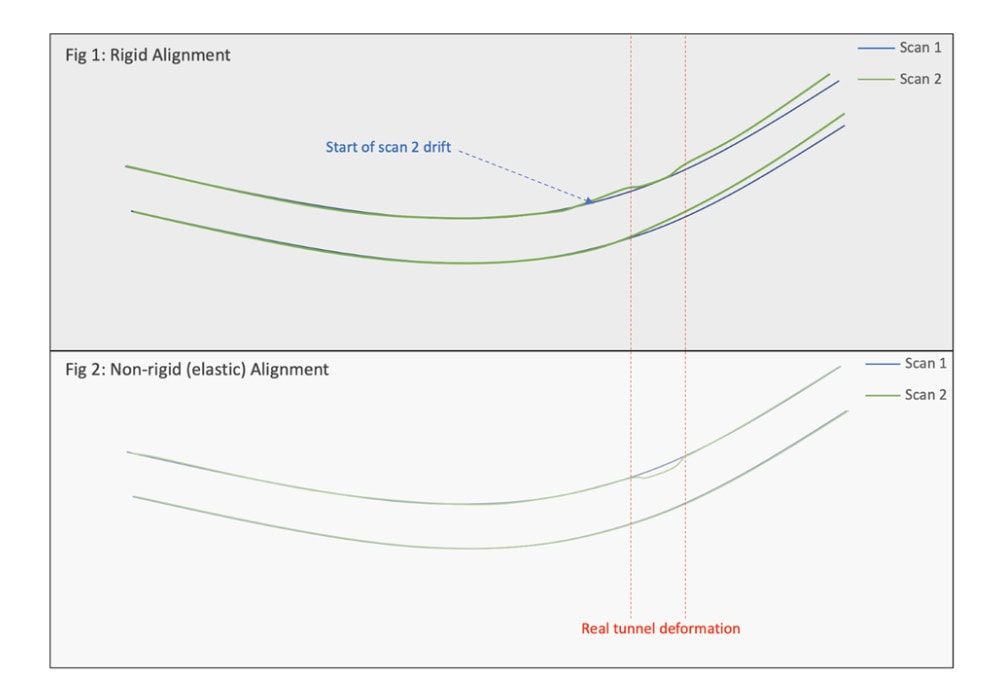
Para mostrar las ventajas de esta alineación inteligente del escáner, considere el ejemplo representado en las Figs. 1 y 2.
La exploración 1, en azul, es la exploración de referencia. Antes de tomar el escaneado 2, mostrado en verde, el túnel experimentó una pequeña deformación resaltada en rojo. Durante la captura del escaneo 2, se produjo una deriva hacia el final del escaneo debido a los errores acumulados del sistema SLAM o a errores en la combinación y georreferenciación de los escaneos estáticos.
En la Fig. 1, una alineación rígida de los escaneos 1 y 2 enmascara la verdadera deformación del túnel y, en su lugar, estima un cambio aparente debido a la deriva del escaneo.
Por el contrario, la Fig. 2 demuestra que una transformación inteligente no rígida tiene en cuenta la deriva y destaca claramente la verdadera deformación del túnel como la diferencia entre el escaneo 1 y el escaneo 2.
Mientras que el algoritmo maneja inteligentemente las deformaciones locales, es importante tener en cuenta que si un túnel entero se desplaza globalmente en la segunda exploración -un caso poco frecuente- la alineación inteligente interpretará esto como una deriva en los datos de la exploración SLAM y los deformará para alinearlos con la exploración de referencia, no detectando así el desplazamiento global.
Al combinar este algoritmo de vanguardia con los flujos de trabajo automatizados de Aura, la solución de Emesentofrece un flujo de trabajo simplificado y fácil de usar que elimina la necesidad de segmentación de datos o alineación manual. Esto la hace ideal para exploraciones largas de elevaciones, túneles y otras áreas subterráneas extensas. Al eliminar la dependencia de software de terceros y minimizar la intervención del usuario, el sistema Emesentofrece un flujo de trabajo más rápido y eficaz, con resultados repetibles y cuantificables sobre dónde se están produciendo cambios o dilataciones, y la velocidad de estos cambios en grandes áreas.
POTENCIAR LAS MEJORES PRÁCTICAS DEL SECTOR
Emesentno sólo mejora la seguridad y la productividad de las explotaciones mineras subterráneas, sino que también subraya el liderazgo de la empresa en tecnología minera. La combinación de la tecnología Wildcat SLAM y el software Aura representa un enfoque transformador de la monitorización geotécnica, ya que ofrece una precisión y eficiencia sin precedentes.
A medida que la industria minera sigue evolucionando rápidamente, el compromiso permanente de Emesentcon la innovación ayudará a impulsar mejoras en la seguridad operativa y la productividad.
Recursos relacionados