地表を超えて地下鉱山におけるコンバージェンス・モニタリングへのEmesent革新的アプローチ
坑内採掘における岩盤の変位と移動のモニタリングは、安全性と作業効率にとって極めて重要である。Emesent は、LiDAR とSLAM ベースのシステムを使用した先進的なソリューションを導入し、地下鉱山でのコンバージェンスモニタリングを強化しました。
Emesent 共同設立者兼CTOのDr.Farid Kendoul は、Emesent チームがどのようにこの技術を適用してデータの精度を向上させ、監視プロセスを合理化し、潜在的な問題の特定と管理により効果的なアプローチを提供したかを説明する。
博士によるFarid Kendoul
一般的な地下の課題に対する斬新な解決策
坑内採掘では、特に岩盤の変位や移動を監視する上で独特の課題がある。
LiDAR 3D マッピング技術は、コンバージェンス・モニタリングに優れた代替手段を提供し、地下トンネルの岩盤の動きや変形をカバーし、豊富な知見を提供する。しかし、効果的なモニタリングのためには、小さな動きや変化(例えば、20mmの動きや変化)を検出するために、2つのスキャン(基準となるスキャンと新しいスキャン)を正確に位置合わせする必要がある。ミスアライメントやスキャンのエラーは、変形や収束の誤った解釈につながる可能性がある。
現在、地下のコンバージェンス・モニタリングには、主に2つの方法(LiDAR )が用いられている:
1.地上波LiDAR スキャナー (TLS)
TLSシステムは、高精度の3D 。地上基準点と組み合わせることで、広域の正確なモデル(3D )を構築することができる。しかし、手作業によるデータ収集は時間がかかり、何キロメートルものトンネルをカバーし、データを準備するのに何日もかかることが多いため、重要な小地域での使用に限られている。
2.モバイル・スキャナーSLAM
これらのスキャナーは、地下の広い範囲を数時間以内に効率よくとらえる。しかし、SLAM のシステムでは、3D の地図に不正確さ(ドリフト)が生じることがある。一部の鉱山では、小面積をスキャンするか、大面積のスキャンを小セクションに分割し、サードパーティのソフトウェアと手作業で厳密な位置合わせを行うことでこの問題に対処しているが、これには時間がかかり、普及には限界がある。
どちらの方法も、参照スキャンと新スキャンの位置合わせを「剛体変換」に頼る。このプロセスでは、ICP(Iterative Closest Point)のような方法を使用して、参照スキャンに合わせて新しいスキャンを移動および回転させる。リジッドアライメントでは、参照スキャンと新規スキャンの両方は変更されず、位置と向き(変換)のみが調整される。この方法は、スキャンの精度が高く、違いは環境の変化だけという理想的な条件ではうまくいくが、何キロも続くトンネルのような大規模な環境には適さない。このような場合、スキャンに内在する不正確さや潜在的なドリフトがミスアライメントを引き起こし、真の変形の検出や収束に誤差をもたらす。
Emesent チームは、LiDAR SLAM ベースのシステムの利点を、前述の制限なしに組み合わせた新しいコンバージェンス・モニタリング・システムの開発に挑戦した。彼らの革新的なアプローチは、LiDAR とSLAM を活用して効率的な大面積スキャンを実現し、広範なスキャンを自動的に位置合わせして正確な結果を出すための新しいアルゴリズムで強化されている。
Emesentのコンバージェンス・モニタリング・システムの核心は、その高度なSLAM テクノロジーである。このテクノロジーは、コンバージェンスと変化検出のための局所的な精度を維持しながら、ドリフトの可能性がある大きなスキャンの非剛性(弾性または柔軟性)アライメントを可能にする。
コンバージェンス・モニタリングへのより効果的なアプローチ
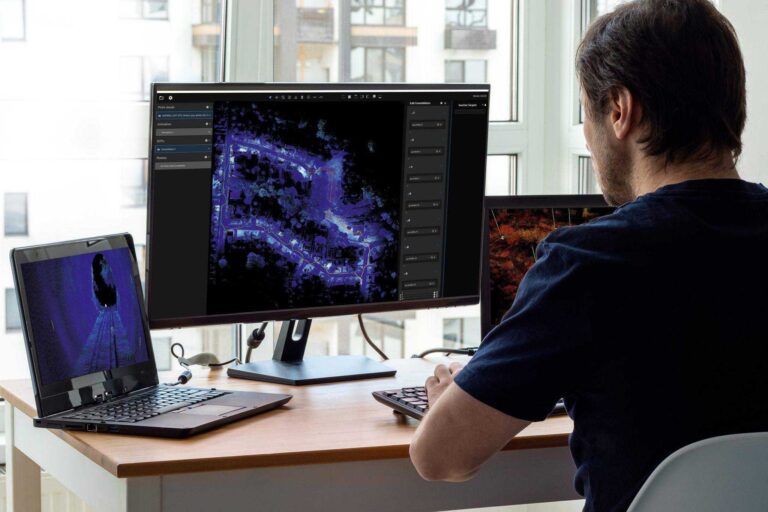
Emesentの変化検出およびコンバージェンス・モニタリング・ソリューションは、ラピッドキャプチャ・モバイルSLAM テクノロジーを、より速く、より簡単に、より繰り返し可能な処理ワークフローと組み合わせたものです。これにより、採掘業者はより広い範囲の掘削を定期的にスキャンし、正確で定量的なデータを使用して変化を監視することができます。
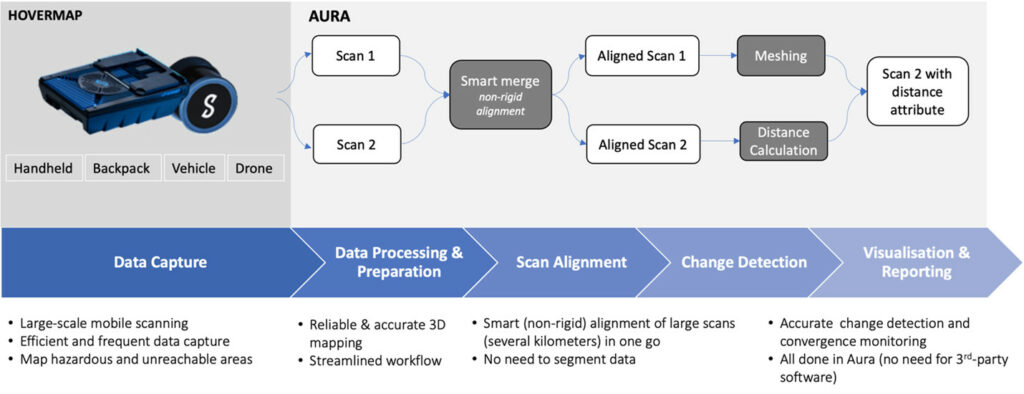
このソリューションは、Emesent の2つの主要製品を組み合わせたものである:
1.Hovermap 、車両、バックパック、ドローン、またはハンドヘルドで配備され、地下のほぼ全域を効率的に、あるいは自律的にスキャンする。
2.Aura生データの処理、スキャンのスマートアライメント、スキャンの比較と変化の計算、結果の視覚化、その他多くの便利な操作のためのデスクトップソフトウェア。これらのワークフローのほとんどは自動化されており、ユーザーの入力は最小限で済む。
イノベーションを通じて実用的な洞察を提供する
Emesentのコンバージェンス・モニタリング・システムは、インテリジェントな非剛性(弾性および柔軟性)アライメントを実現するWildcatSLAM テクノロジーの高度な機能を活用した、地盤工学モニタリングにおける画期的なものである。この革新的なアプローチでは、1つ目のスキャンは基準として使用され変更されませんが、2つ目のスキャンは非剛体変換によって基準スキャンと局所的に位置が合うように弾性修正を受けます。このプロセスは、両スキャンにおける3D 特徴の正確な識別とマッチングに基づいており、ドリフトや誤差を効果的に考慮する。このような局所的な位置合わせは、モバイルSLAM マッピングシステムによって効率的にキャプチャされた広範囲なエリアやトンネルにおける変化を正確に検出し、収束を監視するために不可欠である。
この方法により、何キロメートルにも及ぶ地下トンネルのような広範囲なスキャンの正確な位置合わせが可能になり、スキャンドリフトを調整するために通常使用される面倒なデータ分割プロセスが不要になる一方で、高い精度を達成することができます。その結果、特定のエリアでは5mm、一般的な地下環境では15mmまでの変形や変化を検出することができます。
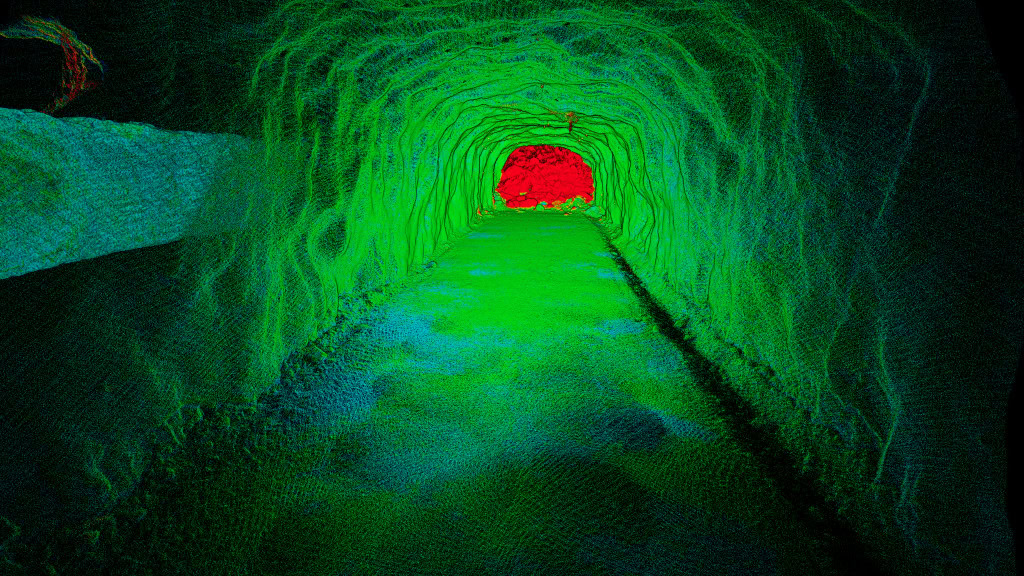
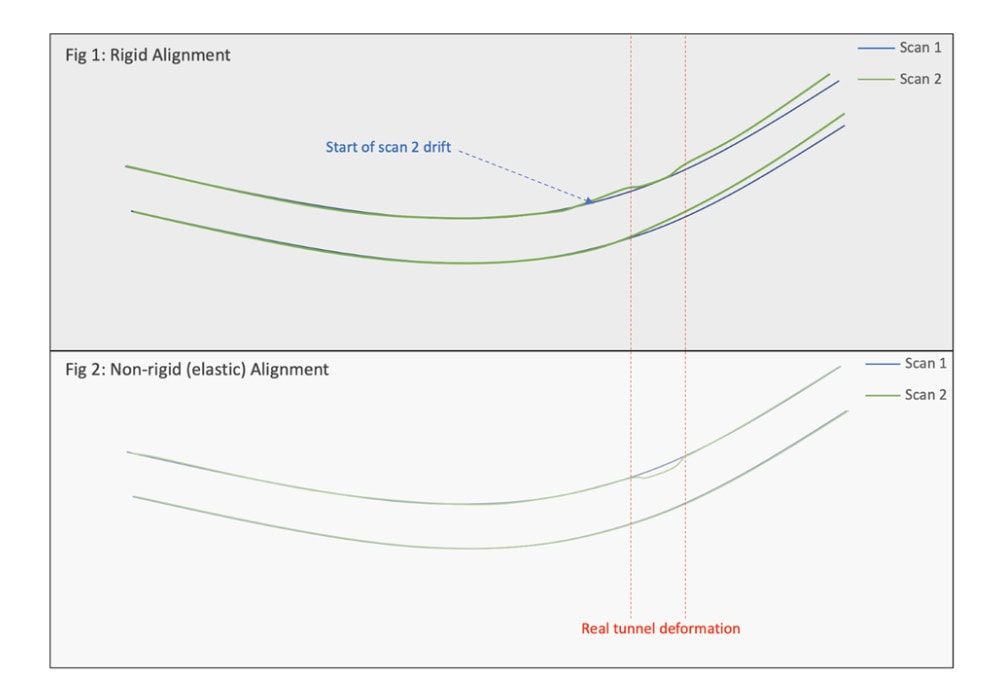
このスマート・スキャン・アライメントの利点を示すために、図1と図2の例を考えてみよう。
青で示したスキャン1が基準スキャン。緑で示されたスキャン2を撮影する前に、トンネルは赤で強調表示された小さな変形を経験した。スキャン2の撮影中、SLAM システムの累積エラー、または静的スキャンの結合とジオリファレンスのエラーにより、スキャン終了時にドリフトが発生した。
図1では、スキャン1とスキャン2を厳密にアライメントすることで、真のトンネル変形がマスクされ、代わりにスキャンドリフトによる見かけ上の変化が推定されている。
対照的に、図2は、スマートな非剛体変換がドリフトを考慮し、真のトンネル変形をスキャン1とスキャン2の差として明確に浮き彫りにすることを示している。
アルゴリズムは局所的な変形をスマートに処理するが、トンネル全体が2回目のスキャンでグローバルにシフトした場合(まれなケースだが)、スマートアライメントはこれをSLAM スキャンデータのドリフトと解釈し、基準スキャンとアライメントするように変形するため、グローバルシフトを検出しないことに注意することが重要である。
この最先端アルゴリズムとAura の自動ワークフローを組み合わせることで、Emesentのソリューションは、データのセグメンテーションや手作業による位置合わせの必要性をなくし、簡素化されたユーザーフレンドリーなワークフローを実現します。このため、坑道、トンネル、その他の広範な地下エリアの長時間のスキャンに最適です。サードパーティのソフトウェアへの依存を排除し、ユーザー入力を最小限に抑えることで、Emesentのシステムは、より迅速で効率的なワークフローを提供し、変化や拡張が発生している場所や、広域にわたるこれらの変化の速度について、再現可能で定量化可能な出力を提供します。
業界のベストプラクティスを強化
Emesentの革新的なコンバージェンス・モニタリング・システムは、坑内採掘作業の安全性と生産性を高めるだけでなく、採掘技術における同社のリーダーシップを強調するものである。WildcatSLAM テクノロジーとAura ソフトウェアの組み合わせは、地質工学的モニタリングへの革新的なアプローチであり、比類のない精度と効率を提供します。
鉱業が急速に進化し続ける中、Emesentの技術革新への継続的なコミットメントは、操業の安全性と生産性の向上を促進するのに役立つ。