Guía de exploración en entornos difíciles
Emesent Hovermap utiliza la tecnología de localización y cartografía simultáneas (SLAM) para conocer su ubicación y generar nubes de puntos precisas. Tras años de investigación sobre la autonomía de los drones, el algoritmo SLAM de Emesentes muy fiable en entornos subterráneos difíciles y otros entornos sin GPS. Sin embargo, SLAM difiere del escaneado láser basado en trípodes en que los resultados capturados dependen más de la identificación de características en el entorno.
Los túneles y las alcantarillas son algunos de los entornos más difíciles para los escáneres de SLAM . La falta de características en estos entornos puede provocar el deslizamiento de SLAM , lo que resulta en una nube de puntos inconsistente que puede ser inutilizable para su propósito final.
En este artículo, le guiaremos a través del escaneado de una alcantarilla complicada y le daremos algunos consejos para asegurarse de obtener siempre el mejor resultado. Si desea ver la nube de puntos que utilizamos en esta guía, puede descargar el conjunto de datos aquí.
Por Ryan Palfrey y Andrew Palmer
¿QUÉ HACE QUE LA ALCANTARILLA SEA UN RETO?
La alcantarilla que estamos escaneando mide 130 m de largo y es bastante estrecha, con 3 m de ancho x 3,5 m de alto.
Tiene el suelo, el techo y las paredes lisos, y el entorno a ambos extremos de la alcantarilla está formado principalmente por árboles y un arroyo.


SLAM utiliza las superficies del entorno para determinar dónde se encuentra Hovermap . Las paredes, el suelo y el techo de la alcantarilla son excelentes características que permiten al Hovermap saber con precisión dónde se encuentra dentro de la sección transversal de la alcantarilla, pero no proporcionan ninguna información sobre dónde se encuentra el Hovermap a lo largo de la longitud de la alcantarilla.
En ausencia de otras características en el entorno, es muy probable que SLAM se deslice en esta dirección.
CONSEJOS PARA LA RECOGIDA DE DATOS EN ENTORNOS CON POCOS RECURSOS
Lo mejor que puede hacer es sujetar el Hovermap de forma que pueda ver ambos extremos de la alcantarilla; por ejemplo, sujete el Hovermap hacia un lado.
Dado que no existen elementos en la alcantarilla que permitan determinar su posición a lo largo de la misma, SLAM se basa en los elementos situados en los extremos de la alcantarilla. Garantizar que ambos extremos sean visibles en la medida de lo posible es clave para minimizar el riesgo de deslizamiento SLAM .
Además, intente colocarse de modo que la Hovermap quede en el centro de la alcantarilla, y evite los movimientos rápidos o bruscos.

Debido al escaso número de características en la alcantarilla, se quiere evitar la introducción de características negativas. Las características negativas son cosas del entorno que pueden confundir a SLAM, como personas y vehículos en movimiento, agua y niebla. Si necesitas que alguien te acompañe por motivos de seguridad, haz que camine por el lado opuesto al tuyo respecto a la Hovermap para que esté en el ángulo muerto y no aporte características negativas.
Si todo lo demás falla, puedes añadir tus propias características a los entornos. Por ejemplo, coloque grandes cajas de cartón cada 50 m aproximadamente. Asegúrate de que no se mueven durante la exploración para que no se conviertan en elementos negativos.
PROCESAMIENTO DE LA EXPLORACIÓN
Recogimos escaneos de la alcantarilla en dos configuraciones:
- Manteniendo la Hovermap a un lado sin que nadie la siga
- Hovermap unido al accesorio de la mochila con alguien que siga
El primer escaneado procesado sin deslizamiento utilizando la configuración por defecto en Aura.
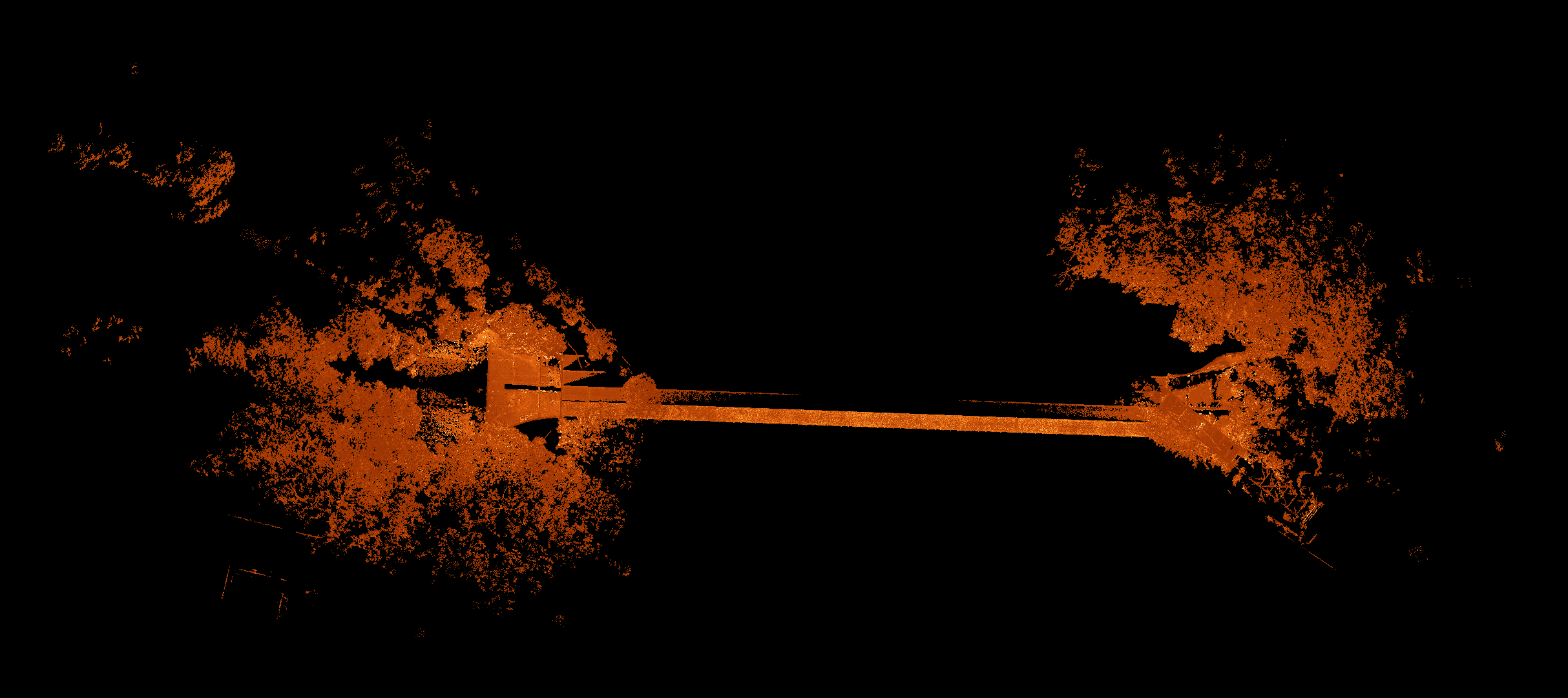
Los grafitis del túnel pueden servir para demostrar que no hubo ningún resbalón.

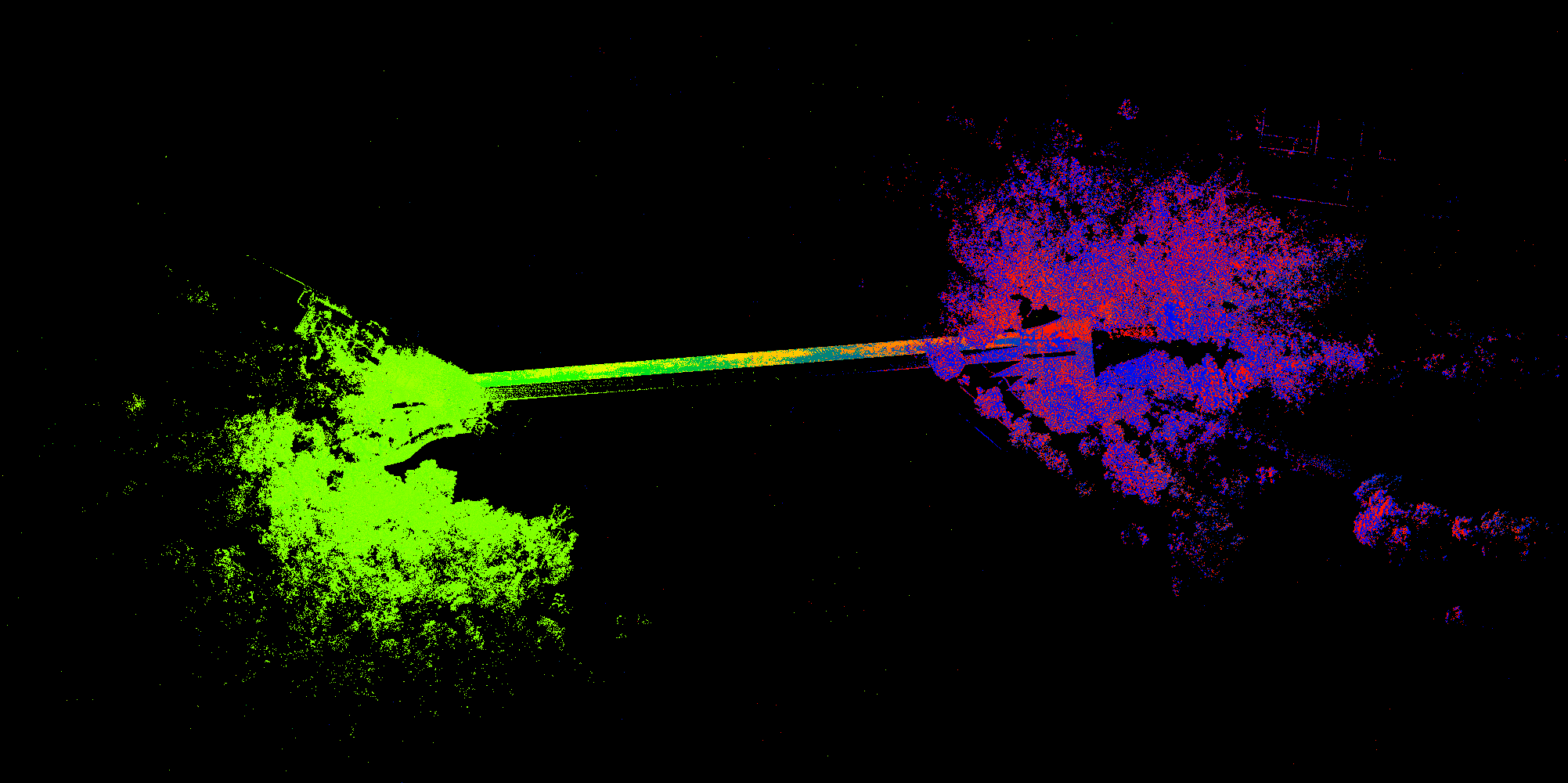
El segundo escaneado no se procesó sin deslizamiento utilizando la configuración predeterminada como resultado del campo de visión restringido por estar montado en la mochila, además de la adición de rasgos negativos de la persona que le seguía. Al colorear el escaneado según la hora se destaca cuándo se ha producido el deslizamiento SLAM . En la imagen tricolor, el escáner comenzó en el lado derecho de la alcantarilla, la atravesó y regresó. En el trayecto de vuelta, SLAM se ha deslizado de forma drástica y, como resultado, el final de la exploración no coincide con el inicio de la misma.
Esta imagen muestra la exploración coloreada por tiempo (azul->verde->rojo). Las partes azul y roja de la exploración son el inicio y el final respectivamente, y deberían estar alineadas.

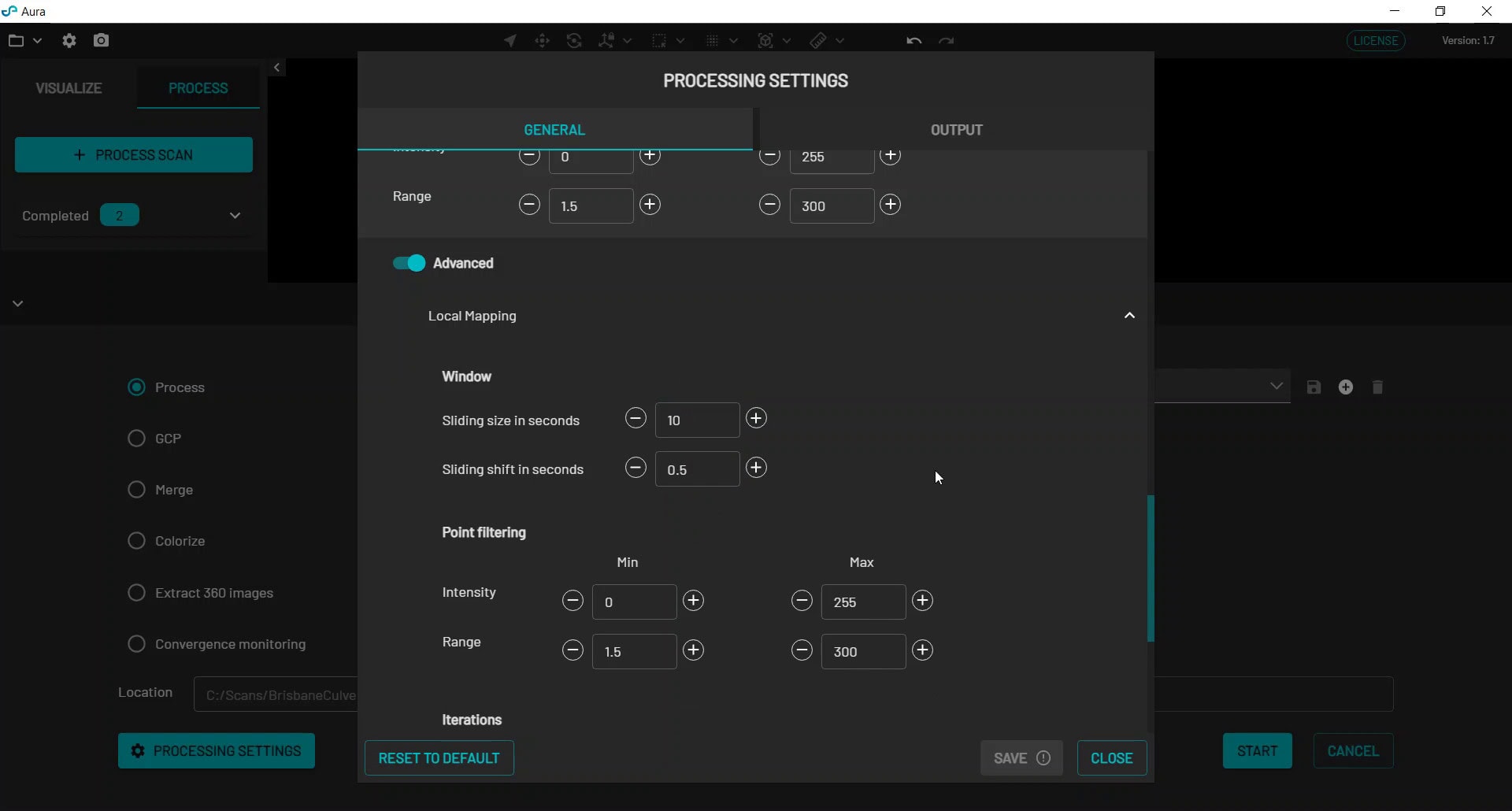
AJUSTES DE PROCESAMIENTO DE AURA
Hay algunos ajustes que podemos cambiar en Aura que pueden ayudar a reducir el deslizamiento del slam.
En Avanzado->Mapeo local->Ventana, cambie el Tamaño de deslizamiento en segundos del valor predeterminado de 5 a 10, y el Desplazamiento de deslizamiento en segundos del valor predeterminado de 1 a 0,5. Tenga en cuenta que modificar estos valores de esta forma aumenta el tiempo de procesamiento de algunas partes del pipeline de SLAM entre 4 y 5 veces.
Con estos ajustes modificados de Aura , el escaneado se procesa ahora correctamente sin ningún deslizamiento, y el inicio y el final del escaneado se alinean perfectamente.
Si en algún momento necesita asesoramiento sobre una exploración complicada, no dude en ponerse en contacto con nosotros: estaremos encantados de ayudarle.
Mientras tanto, si desea ver la nube de puntos que hemos utilizado en esta guía, puede descargar el conjunto de datos aquí.
Recursos relacionados

