Emesent 、GPSが届かない環境の完全自律探査とマッピングを実現
Cortex 4.0とCommander 2.1ソフトウェアのリリースを発表
自律型デジタル・マッピングの世界的リーダーであるEmesent、自律型マッピング・テクノロジーのこれまでで最も重要なアップグレードにより、大きな能力のマイルストーンを通過した。
Emesent受賞歴のあるSLAM LiDAR スキャナーHovermap 、その初期に、危険でGPSが使えない環境でも現場管理者が作業上のリスクを特定できるような重要な状況データを安全に提供するソリューションを必要とする鉱業クライアントの間で人気を博した。
Hovermap Cortex ソフトウェアで駆動する自律型ドローンにより、オペレーターは、ストープ、鉱石パス、ヘディング、古い坑道など、アクセスしにくい、または制限された環境を迅速に調査し、実用的な詳細を得ることができた。
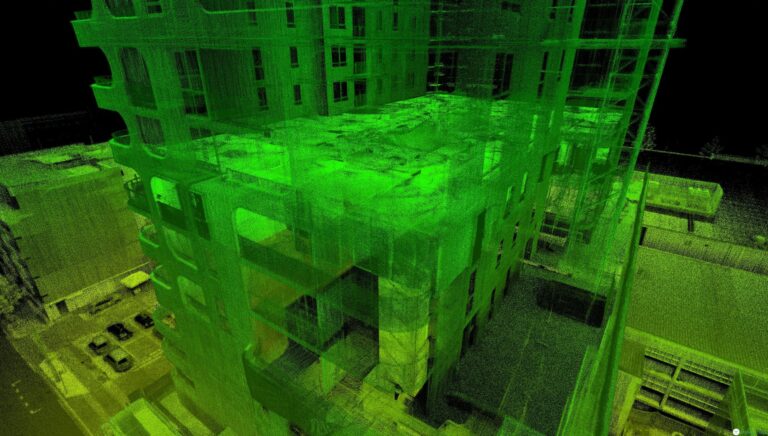
これらの能力をベースに、Cortex 4.0は完全に自律的なナビゲーションと探査を提供し、最も厳しい条件下でも、これまでアクセスできなかった地域のマッピングを可能にする。
またEmesent Cortex ソフトウェアは、障害物回避機能の強化、卓越したダストフィルター機能、暗闇や濡れた環境での信頼性の高い性能を備えており、Hovermap 優れたデータキャプチャを提供し、より安全で確実な飛行を可能にします。
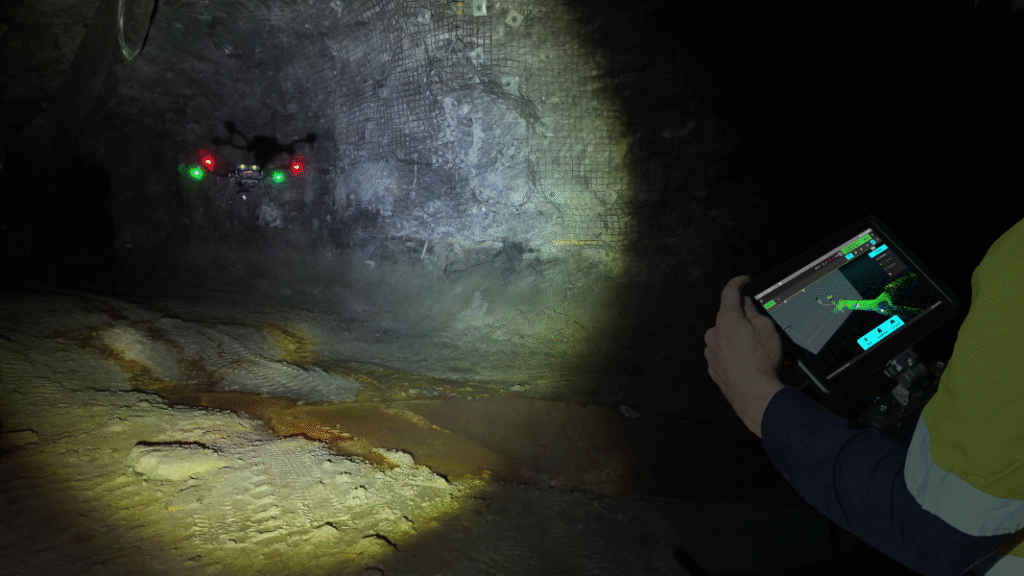
一方、Emesentミッション計画・制御アプリであるCommander、オペレーターが簡単に自律ミッションを設定し、進捗状況をリアルタイムで監視することを可能にする。ミッションを計画するためにウェイポイントを設定する必要はない。Commander ボリュームのバウンディングボックスを指定するだけで、Hovermap 自律的にそのボリュームを探索して完全にマッピングし、ホームに戻る。
このCortex Commander 組み合わせたリリースは、我々の自律型マッピングソリューションにおけるここ数年で最大の進歩を意味する。自律探索ベースのデータキャプチャを可能にすることで、比類のない使いやすさを実現し、作業の安全性をさらに高め、以前はアクセスできなかったエリアでのデータキャプチャを可能にする。
- ステファン・フラバー、共同創設者兼最高戦略責任者
ブームマウント型CMSのような従来のマッピング手法は、作業員を危険な状態に置くことにより、作業員のリスクを高めます。Emesentソリューションは、測量士が視線や通信範囲を超えた未知のターゲットエリアの正確な画像を構築できるようにすることで、ワークフローを変革します。
これを実現するため、Emesent Hovermap アクセスしにくい環境に取り組む方法を強化した。
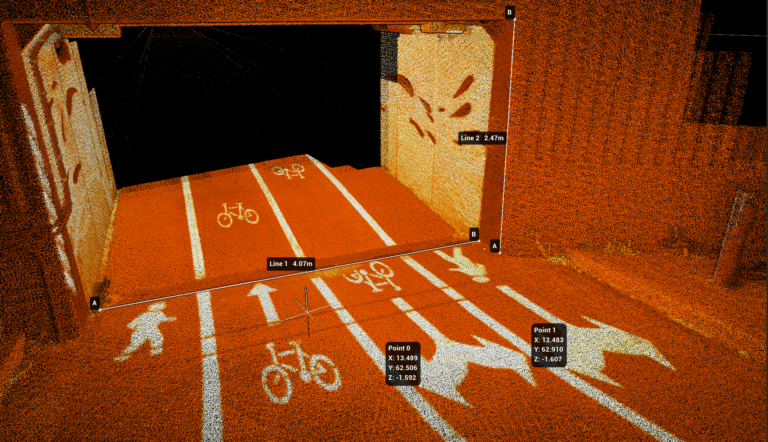
「我々は、Hovermap さらに狭い空間を自律飛行できるようにすることで、オペレーターにさらなる信頼を与えています。Hovermap認識技術の向上により、ドローンは人間の介入なしに2.4メートルの隙間を通り抜けることができるようになりました。
Emesent また、ミッション後にHovermap 上で点群データを作成し、Commander 詳細に表示できるようにすることで、捕捉したHovermap 基づく意思決定から行動までの時間を短縮した。
「新しいオンボード・プロセッシングにより、オペレーターはミッション終了後すぐにキャプチャしたデータを見ることができ、現場での意思決定のスピードが向上しました。「データを処理して視覚化するために基地に戻るのを待つ必要はもうありません。
完全自律型探査とマッピングの詳細については、こちらでご覧いただけます。 製品説明会.Hovermap詳細についてはCortexCommanderAuraHovermap アクセサリー、Emesent 産業ソリューションについては Emesent ウェブサイト.
Emesentオートノミー・サブスクリプションの既存ユーザーは、ライセンスを変更することなく、新機能にすぐにアクセスできます。Emesent Cortex バージョン4.0とCommander バージョン2.1は、Emesent ウェブサイトのクライアントポータルを介して、既存のクライアントが利用できるようになりました。
すべてのEmesent 製品のデモをご希望の方は ご予約ください デモを予約する.
メディア関連のご質問は、お問い合わせの際に「マーケティングチームへのお問い合わせ」を選択してください。