鉱山の再突入に革命をもたらし、安全性と生産性を向上させる自律型ロボットとは?
自律型ロボットは単なる印象的な技術ではない。地下採鉱、特に発破後の段階における安全性と効率性を変革するカギを握っているのだ。
Emesentの共同設立者兼CTO(最高技術責任者)、Farid Kendoul が主催した最近のウェビナーでは、ポストブラスト採掘における自律型ロボットの画期的な役割について掘り下げ、新時代の操業への道を開いた。

その一部を紹介しよう。
現在のマイニングシーン
自律型ロボットの能力を掘り下げる前に、従来の採掘作業の現状と、なぜ技術的な見直しが必要なのかを考えてみよう。
凝り固まった慣行やバラバラのレガシーシステムは、重大な安全リスクを伴う危険な環境につながる可能性がある。こうした課題は、操業の非効率、資源の浪費、利益の減少を招く。このような体制は、労働者の安全を脅かすだけでなく、事故が長期間のダウンタイムにつながるため、採掘現場の進歩も妨げ、業界の課題をさらに深刻にしている。
自動化を取り入れることで、特に短期的には、安全性と生産性の面で大きな利益をもたらすことができる漸進的な変化を通じて、改善への道を提供する。自動化は、時間の経過とともに、業界のより重要な変革につながる実用的な解決策を提供する。高度なセンス・プラン・アクト機能を搭載したこのアプローチは、効率性、生産性、安全性の向上を約束し、現場全体の改善に貢献する。
自律性を備えたポストブラスト・ワークフローの高度化
再突入前の発破後検査は、採掘における極めて重要な段階を意味します。しかし、既存のブラスト後のモニタリングと検査は、ダウンタイム、収益損失、安全性の懸念につながります。
当社のエンド・ツー・エンド・ソリューションは、3つの重要なコンポーネントを使用して、発破後のモニタリングを再定義します:
- 地下ロボット:高度なセンサーと自律性を備えたこれらのロボットは、作業の中心である。
- 遠隔ロボット操作:地下ロボットを遠隔操作しながら、そのデータを処理し、洞察を得る。
- データプラットフォーム:データ管理と共有のためのオールインワン・プラットフォーム。
これらのコンポーネントを統合することで、ワークフローの主要部分の自動化が可能になり、シームレスで使いやすいワークフローが実現します。ミッションの計画、実行、データの取得、分析、報告すべてが一体となり、爆発後の再突入を一変させます:
- ダウンタイムの削減:発破後のダウンタイムを最小限に抑えることで、鉱山の生産性を高めます。
- 安全性の向上:作業員を危険から守り、より安全な作業環境を実現します。
- オペレーションを最適化:データを活用してその後のオペレーションを改善し、生産性を向上させる。
- 柔軟性と調整:鉱山でのワークフローと自律性レベルに適応し、完璧な適合を保証します。
- 規制遵守:規制遵守をサポートするための記録を作成する。

Emesentポストブラスト・イノベーションをリードする
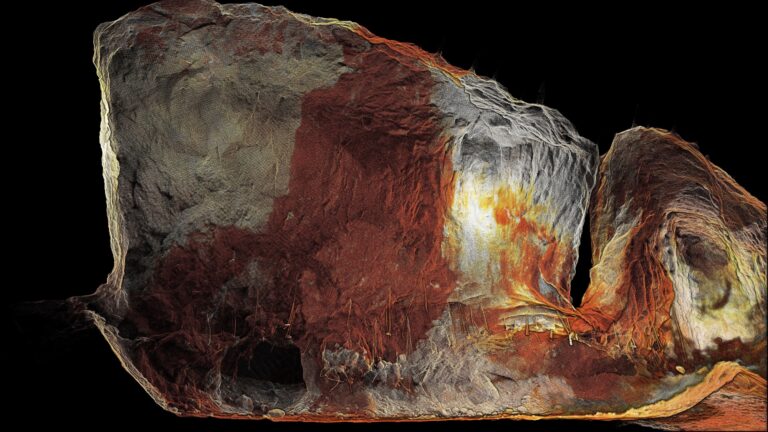
Emesent では、発破後のプロセスの分析を自動化しています。当社の先駆的なプロトタイプは、その自律性と3D LiDAR 測量で有名なHovermap とBoston Dynamics Spot ロボットを組み合わせたものです。このダイナミックなコンビは、オーストラリア、南アフリカ、アメリカの現役の地下鉱山で試用され、目覚ましい成果を上げています。
このコラボレーションは、多くの利点を備えた比類のない自律型ロボットシステムを提供する:
- 多様な地形をナビゲート:難易度の高い地下の風景を難なく踏破しよう。
- 確実な位置特定:複雑な地下環境でもピンポイントで位置を特定
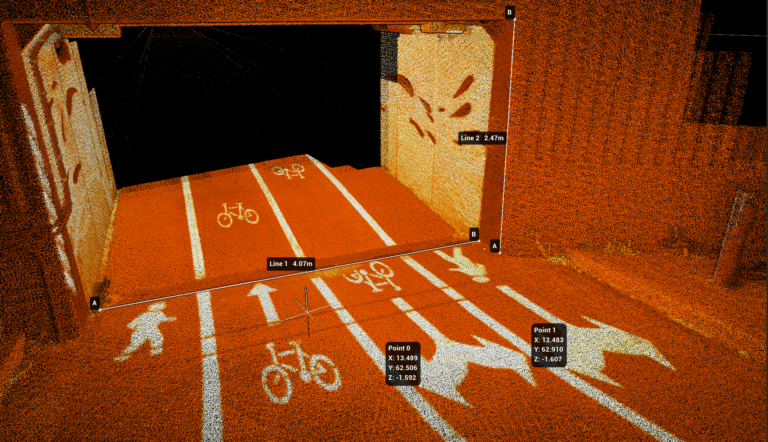
- 3D 知覚: 3D で周囲の状況を把握し、障害物を正確に避ける。
- 柔軟な自律性:さまざまな自律性レベルでミッションを実行する。
- 遠隔操作:通信範囲を越えて動作し、リモート機能を強化します。
- シームレスな統合:既存のインフラやワークフローに簡単に統合できます。
爆風後の再突入にとどまらず、このHovermap とBoston Dynamics Spot のペアは多用途であることを証明している。リアルタイムの地下ナビゲーション、回避、危険区域のマッピング、地表の検査、さらには地震後の評価に優れています。
ソリューションの実例をご覧ください
Hovermap 。当社の無料ウェビナー 「ポストブラスト採掘における自律型ロボットの役割」では、ロボットによるモバイルマッピングの実際のアプリケーションを紹介しています。お客様の目的に応じて、どのようにオペレーションに革命を起こすことができるかをご覧ください。
この革新の可能性を発見し、当社のアーリー・アダプター・プログラムがどのように自律型システムで貴社を強化できるかを探ってください。
未来を形作る
EmesentのHovermap とBoston Dynamics Spot 自律的な3D LiDAR マッピングを動力源とする機敏なロボットは、日々の採掘作業の増強を約束する。業界の将来は、変化を求める重要な要因に後押しされ、有望視されている。ESGの遵守が急務であり、国や世界の温室効果目標に沿ったネット・ゼロ目標の達成に向けた協調的な取り組みが必要であり、再生可能エネルギー・システムに電力を供給する重要な鉱物の需要が急増している。さらに、データ主導の洞察を通じて安全性と効率性を高めるためにデジタルツールを活用する、業界で働く人々の技術的スキルの進化も、大きな変化の原動力となっている。この変革的な状況を乗り切るには、継続的な研究、開発、業界関係者との共同作業を含む、学際的なアプローチが必要である。
Emesent は、この技術革新を活用し、より安全で生産性の高い現場を世界的に創出するために、鉱山経営者と熱心に提携している。
-
ゲームチェンジャーテクノロジーを直接体験してみませんか? デモのご予約今すぐデモを予約して、自律性がどのように採掘作業を向上させるかをご覧ください。