自主机器人如何通过变革矿井爆破后的重返工作来提高安全性和生产率
自主机器人不仅仅是令人印象深刻的技术,它们还是改变地下采矿安全和效率的关键,尤其是在爆破后阶段。
我们最近的网络研讨会由Emesent的联合创始人兼首席技术官Farid Kendoul 主持,深入探讨了自主机器人在爆破后采矿中改变游戏规则的作用,为新的运营时代铺平了道路。

以下是我们的报道内容。
当前的采矿业
在深入探讨自主机器人的功能之前,我们先来看看传统采矿作业的现状,以及为什么它们已经到了进行技术改革的时候。
传统的做法和脱节的遗留系统会导致环境危险,带来巨大的安全风险。这些挑战导致运营效率低下、资源浪费和利润减少。这种设置不仅会危及工人的安全,还会阻碍采矿现场的进展,因为事故会导致长时间停工,从而加剧该行业面临的挑战。
自动化提供了一条通过渐进式变革的道路,可以在安全和生产率方面产生巨大效益,尤其是在短期内。自动化提供了一个切实可行的解决方案,随着时间的推移,可能会给行业带来更重大的变革。在先进的 "感知-计划-行动 "功能的支持下,这种方法有望提高效率、生产率和安全性,从而促进现场的整体改善。
改进爆破后的工作流程
重返矿井前的爆破检查是采矿业的一个关键阶段。然而,现有的爆破后监测和检查导致工程时间延后、收入损失和安全问题。
我们的点到点解决方案使用三个基本组件重新定义了爆炸后监测:
- 地下机器人:这些机器人配备了先进的传感器和自动装置,是作业的核心。
- 远程机器人操作:远程操作地下机器人,同时处理其数据并从中获得启示。
- 数据平台:一体化数据管理和共享平台。
将这些组件整合在一起,可以实现工作流程关键部分的自动化,使其无缝衔接,方便用户使用。任务规划、执行、数据采集、分析和报告等所有工作都汇集在一起,从而改变了爆炸后的重返大气层工作:
- 减少停机时间:最大限度地减少爆破后的停机时间,从而提高矿山生产率。
- 增强安全性:使人员远离危险,创造更安全的工作环境。
- 优化操作:利用数据完善后续操作,提高生产率。
- 灵活性和一致性:适应矿井工作流程和自主水平,确保完美契合。
- 监管合规:生成记录,为遵守法规提供支持。

Emesent领先的爆破后创新技术
在Emesent ,我们正在对爆破后过程进行自动化分析。我们的开创性原型将Hovermap 与Boston Dynamics Spot 机器人配对使用,后者以其自主性和3D LiDAR 勘测而著称。这对充满活力的组合已在澳大利亚、南非和美国的活跃地下矿井中试用,并取得了显著效果。
这种合作为自主机器人系统提供了无与伦比的诸多优势:
- 驾驭各种地形:毫不费力地穿越充满挑战的地下景观。
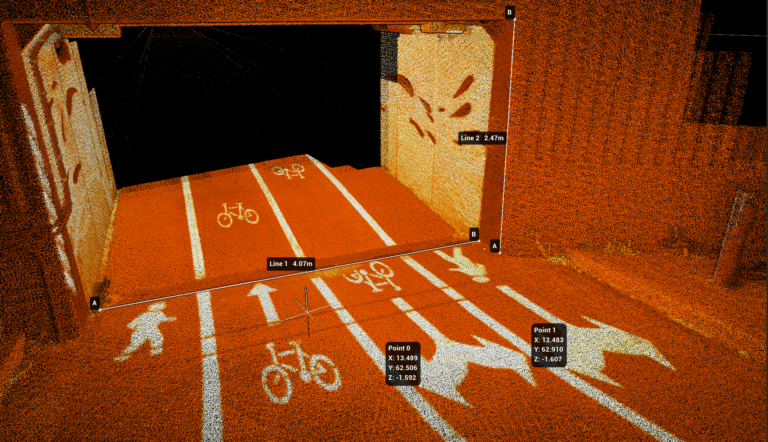
- 可靠定位:在复杂的地下环境中精确定位。
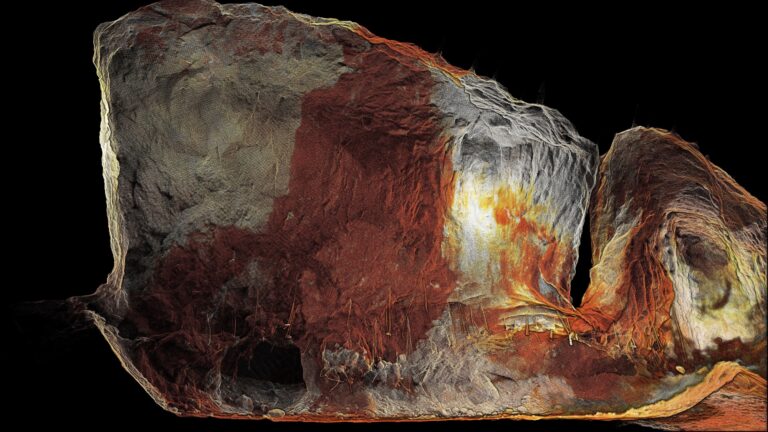
- 3D 感知:在3D 中可视化周围环境,准确避开障碍物。
- 灵活自主:以不同的自主级别执行任务。
- 远程操作:在通信范围之外操作,增强远程能力。
- 无缝集成:轻松集成到现有基础设施和工作流程中。
除了爆破后重返大气层外,这个Hovermap 和Boston Dynamics Spot 的组合还被证明用途广泛。它在实时地下导航、避险、绘制危险区域地图、地表检查甚至震后评估方面都有出色表现。
见证解决方案的实际应用
想了解Hovermap 的实际应用吗?我们的免费网络研讨会 "自主机器人在爆破后采矿中的作用"展示了通过机器人进行移动测绘的实际应用。了解它如何根据您的目标彻底改变您的操作。
发现这一创新的潜力,探索我们的 "先行者计划 "如何通过自主系统为贵公司赋能。
塑造未来
Emesent Hovermap 和 灵活机器人由自主 映射驱动,有望加强日常采矿作业。在要求变革的关键因素的推动下,该行业的未来充满希望。目前,该行业迫切需要符合环境、社会和公司治理(ESG)要求,需要共同努力实现净零排放目标,以符合国家和全球的温室气体排放目标,同时对为可再生能源系统提供动力的重要矿产的需求也在激增。此外,行业工人的技术技能也在不断发展,他们利用数字工具,通过数据驱动的洞察力来提高安全和效率,这也是推动变革的重要因素。要驾驭这一变革形势,需要采取多学科方法,包括持续研究、开发以及与行业利益相关者的合作。Boston Dynamics Spot 3D LiDAR
Emesent 我们热切地与矿山运营商合作,利用这种创新,在全球范围内创建更安全、更高产的矿区。
-
准备好亲身体验这项改变游戏规则的技术了吗? 预约演示今天就来见证自主性如何提升您的采矿作业。