-
施工竣工测量
在极短的时间内提供详细的3D 竣工模型
-
通过快速、准确和持续的数据采集提高竞争力
竣工图对于确保所有利益相关者准确记录和全面了解施工现场至关重要。竣工图还能突出显示施工过程中偏离设计的变化(无论是否有意为之),并为未来的翻新、扩建和维护提供规划。然而,建筑项目的复杂性和动态性给准确、完整和及时地编制竣工文件带来了诸多挑战。施工过程中对原始计划的修改可能难以捕捉,导致数据不完整或不匹配,而施工的快节奏又意味着难以及时更新文档。再加上手工操作或整合不同软件工具和有效管理大量数据的挑战,这些都会产生重大影响。事实上,一项研究表明,糟糕的建筑数据会导致全球建筑业损失 1.8 万亿美元。
要应对这些挑战,需要将更好的技术、改进的流程和有效的沟通结合起来,以确保竣工文件准确反映最终的施工环境。
竣工数据采集具有挑战性
依靠人工测量和数据收集来编制竣工文件是一种劳动密集型方法,容易出现人为错误,而且难以整合。这种方法往往会导致不准确、细节不完整、项目延误和人工成本增加。此外,这种方法缺乏可扩展性,无法捕捉到项目的全部空间背景或细微差别。
因此,随着激光扫描技术的出现,工程师们开始使用地面激光扫描仪(TLS)来捕捉建成后的环境。然而,尽管激光扫描技术具有诸多优势,但它仍然面临着一些挑战。TLS 设备和软件的初始成本很高,这可能会成为某些项目的障碍。为确保准确的数据采集和处理,需要专门的培训和专业知识,从而增加了项目所需的技能。设备安装耗时,而且必须多次安装,导致数据采集速度缓慢,无法有效地进行定期扫描,以确保文件是最新的。此外,虽然 TLS 可以捕捉到详细的3D 信息,但仍可能需要辅助方法来捕捉某些隐蔽或无法进入的区域。天气条件、照明和障碍物等环境因素也会影响扫描质量。
-
Emesent 解决方案
Emesent Hovermap 将精确度与采集速度相结合,让您只需传统方法的一小部分时间就能提供详细的3D 竣工模型。其先进的SLAM 算法和连续扫描功能可对复杂环境进行准确、快速和详细的数据采集,并可轻松扩展到大型项目。
多种部署方式,包括手持式、背包式或安装在杆子上的方式,提供了采集管道和机械周围等复杂区域所需的多功能性。此外,实时处理功能可在扫描过程中进行即时反馈和调整,以确保完整的数据采集,而无需返回现场。
采集的数据会在Emesent Aura 中自动进行地理坐标标注,以便导入 Revit 等 BIM 工具,支持在整个项目生命周期内持续更新和维护文档。
-
快速数据采集
数据采集速度比传统方法快 7 倍,可进行定期扫描,以便与设计进行比较
-
更快的工作流程
自动目标检测和地理参照意味着无需接触每个控制点--可实现连续扫描和不间断图像采集
-
准确的结果
捕捉精确的3D 空间数据和复杂的结构细节,包括墙壁、天花板、地板以及机械、电气和管道系统
-
易于使用
用户无需接受大量培训,即可在几分钟内获取准确数据
-
多功能部署
以多种方式部署一个Hovermap 设备,以确保完整的数据采集
-
提高竞争力
更快的数据采集可以在更短的时间内完成更多的工作。对您的业务有利,对您的客户也有利。
-
-
业务工作流程
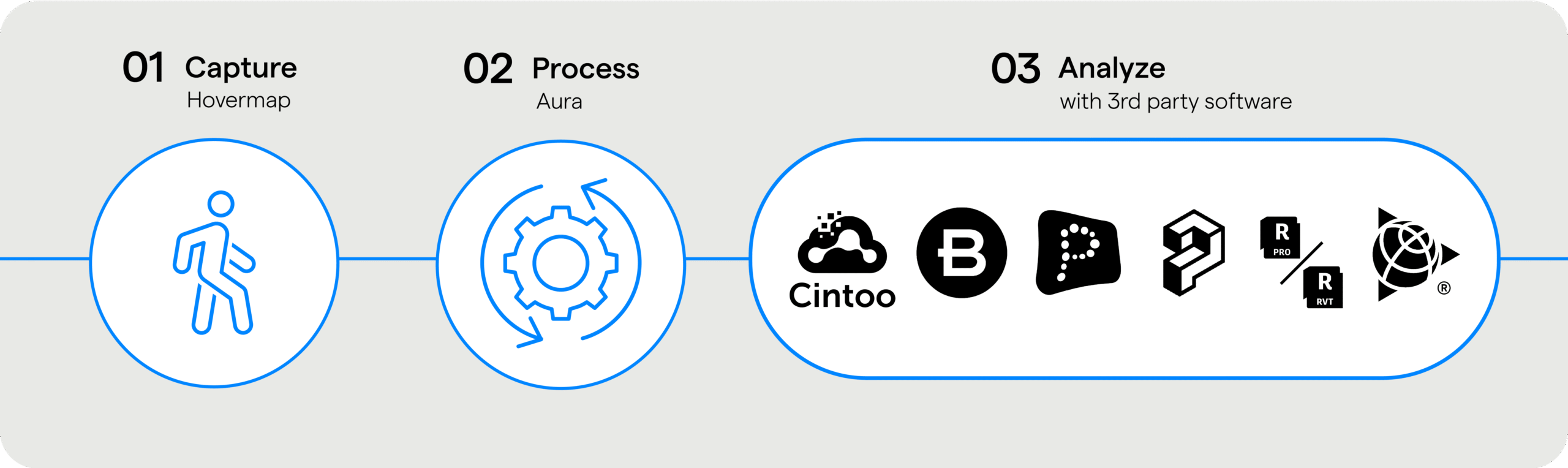
- 将Hovermap 安装在手持设备、背包、杆子或无人机上。
- 在Aura 中使用 RTK 或 GCP 对数据集进行处理、自动地理参照、合并、清理和准备。
- 轻松导入第三方工具 - Cintoo、Bentley、Pointerra、Prevu3D、Recap/Revit、Trimble Business Centre - 以提取特征、建模和可视化。
-
快速、准确的3D 数据采集,用于竣工建模
快速、准确、持续地采集复杂环境中的数据,提高竞争力。
-

多功能部署
即插即用的设计便于在不同平台之间切换 - 手持式;连接到无人机、车辆或杆子上;放入笼子中;或安装到背包上
-

重量轻、外形紧凑
用于单手或免提扫描,不受狭小空间或复杂环境的影响
-

边扫描边流览
3D 通过Commander 应用程序实现环境的实时可视化
-

360 colorization
为您的点云添加更多上下文,挖掘更丰富的洞察力,帮助利益相关者了解情况
-

360 图像采集
同样的扫描可用于提取 360 幅图像,这些图像可与点云并排查看,以突出显示感兴趣的区域
-

调查等级结果
一流的SLAM ,结合自动地理参照,进一步提高结果质量
-

合并多个数据集
在不同时间、不同区域采集扫描结果,并轻松合并到一起
-

软件集成
导入标准 CAD 软件包,包括PointCab 和 Revit/AutoCAD
-

设置和遗忘处理
自动清洁工具可清除环境中的移动物体
-
-
想看更多?
立即查询