Emesent 宣布Hovermap 与 Boston Dynamics® Spot® 机器人集成
自主无人机测绘技术的世界领导者、 Emesent通过与Hovermap 集成,Boston Dynamics Spot 敏捷机器人,该公司进一步推进了其在无法到达的地区进行测绘的愿景。
整合后,Emesent的自主绘图工具Hovermap 与Spot 机器人的动态功能实现了强有力的结合。
Hovermap 是唯一基于SLAM 的LiDAR 测绘解决方案,可在数秒内轻松在基于无人机、手持设备和现在基于Spot 的测绘之间切换,为在具有挑战性的环境中获取准确、完整的数据提供了一种解决方案。
Emesent 将于 2 月 11-13 日在科罗拉多会议中心举行的丹佛地理周(Geo Week)上正式发布其Hovermap -Spot 地图解决方案。 Hovermap 它还将展示Spot 的高级自主功能,该功能将通过 "早期用户计划"(Early Adopter Program)发布。
该解决方案包括一个用于Hovermap 的坚固支架和软件集成,可提供无缝的用户体验。该支架可在具有挑战性的环境中保护Hovermap ,并通过Spot的电池供电,同时还能快速、方便地安装和拆卸Hovermap 装置。软件集成允许通过Spot 界面启动和停止Hovermap LiDAR 扫描,既可以在操纵杆任务期间启动和停止,也可以在Spot AutoWalk 任务期间作为任务自动启动和停止。

Hovermap 整合增强了Spot 平台的关键移动勘测功能,包括
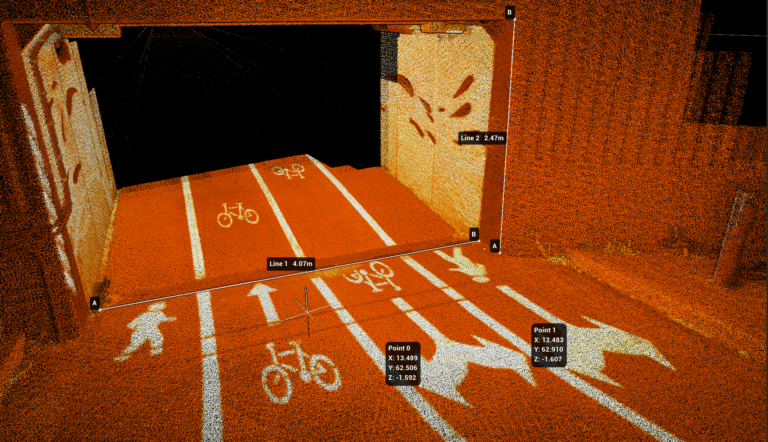
- 基于 SLAM 的3D LiDAR 快速制图,可生成高分辨率、高密度数据,用于精确的可视化和分析。
- 自动行走扫描任务。 Hovermap 扫描可作为Spot AutoWalk 任务期间的任务自动启动/停止,从而可对制造工厂、建筑工地等进行常规测绘。
Emesent 联合创始人兼首席战略官Stefan Hrabar 博士说,这项组合技术具有巨大的潜力,它能够测绘那些原本无法触及的区域。
"有些地方往往过于危险,人类无法进入,或者无人机无法穿越。将Emesent'sHovermap 的自主性和测绘能力与Boston Dynamics'Spot 机器人相结合,可以让组织将其实际触角延伸到无法进入的空间--让工作人员以虚拟的方式进入并了解那些以其他方式无法进入的地点。"
在对Spot 机器人进行了多种环境下的试用后,我们发现该平台的可操作性、坚固性和先进功能非常适合Hovermap,两者的结合将为客户提供新的数据采集可能性。
这包括在人或无人机无法进入的区域采集数据,无论是由于结构不稳定、空间受限,还是由于有毒气体或有毒物质等危险条件。这与建筑、工程、公共安全和采矿等行业息息相关。
赫拉巴尔博士解释了为什么这种进一步探索的能力如此宝贵。
"它使工作人员能够收集到原本可能无法统计的洞察力,从而最终提高当前和未来项目的生产率和安全性"。
Emesent Hovermap LiDAR 测绘和自主有效载荷,在自主移动测绘领域赢得了全球声誉。该公司的技术使无人机能够探索和勘测具有挑战性的室内或地下环境(包括那些没有 GPS 接收功能的环境),从而从 数据中获得有价值的见解,并在提供地下矿井等高风险环境的精确可视化方面表现出色。Emesent 3D
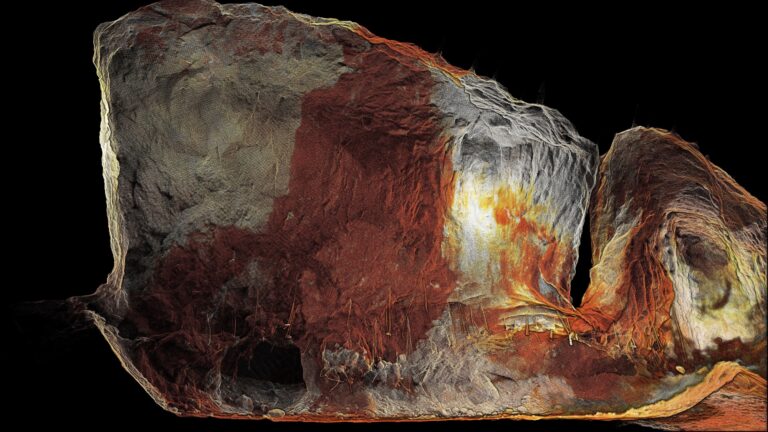
据 Hrabar 博士称,Hovermap 和Spot 已经在爆破后采矿场等危险环境中进行了测试。"Hovermap -Spot 的集成非常适合对速度、多功能性和数据质量要求极高的地下和地面勘测、现实捕捉和应急响应。展望未来,随着我们发布新的自主数据捕获功能,用户将进一步受益,从而实现更高效的操作。
Emesent Hovermap Spot 的自主性和映射功能可为其日常工作流程带来的不同。感兴趣的机构可以 联系Emesent 了解更多信息。
欲了解Emesent在爆破后采矿环境中应用Spot 敏捷机器人的更多信息,请阅读以下博客 博客 或观看 网络研讨会Emesent 首席技术官兼联合创始人Farid Kendoul 博士主讲。