挑战性环境中的扫描指南
Emesent Hovermap 无人机使用同步定位和绘图 (SLAM) 技术了解自己的位置并生成精确的点云。经过多年对无人机自主性的研究,Emesent的SLAM 算法在具有挑战性的地下和其他 GPS 信号缺失的环境中具有很高的可靠性。不过,SLAM 与基于三脚架的激光扫描不同,其采集结果更依赖于识别环境中的特征。
对于SLAM 扫描仪来说,隧道和涵洞是最具挑战性的环境。在这些环境中,由于缺乏特征,SLAM ,导致点云不一致,可能无法用于最终目的。
在本篇文章中,我们将指导您扫描一个具有挑战性的暗渠,并指出一些确保您每次都能获得最佳结果的技巧。如果您想查看本指南中使用的点云,可在此处下载数据集。
作者:Ryan Palfrey 和 Andrew Palmer
暗渠为何具有挑战性?
我们正在扫描的暗渠长 130 米,宽 3 米,高 3.5 米,相当狭窄。
它的地面、天花板和墙壁都很光滑,暗渠两端的环境主要由树木和小溪组成。


SLAM 它利用环境中的表面来确定Hovermap 的位置。暗渠的墙壁、地面和顶棚都是很好的特征,可以让Hovermap 准确地知道自己在暗渠横截面内的位置,但不能提供任何有关Hovermap 在暗渠长度方向上的位置信息。
如果环境中没有任何其他特征,SLAM ,就很有可能滑向这个方向。
在低功能环境中收集数据的技巧
最好的办法是拿着Hovermap ,让它能看到暗渠的两端;例如,把Hovermap 拿到一边。
由于暗渠内没有可用于确定其沿暗渠长度方向位置的特征,SLAM ,而是依赖于暗渠两端的特征。确保两端尽可能可见是将SLAM 滑移风险降至最低的关键。
此外,应尽量使Hovermap 位于暗渠的中心位置,避免快速或生硬的动作。

由于暗渠中的特征数量较少,因此要避免引入负面特征。负面特征是指环境中会混淆SLAM 的事物,如移动的人和车辆、水和雾。如果出于安全考虑,您需要有人陪同,请让他们走在您与Hovermap 的对面,这样他们就会处于盲区,不会造成负面特征。
如果没有其他办法,您可以在环境中添加自己的特色。例如,每隔 50 米左右放置一个大纸箱。您需要确保这些纸箱在扫描过程中不会移动,以免成为负面特征。
处理扫描
我们采集了两种结构的暗渠扫描图:
- 在无人跟随的情况下,将Hovermap 举到一边
- Hovermap 与背包配件相连,有人跟随
第一次扫描使用Aura 中的默认设置进行处理,没有出现滑动。
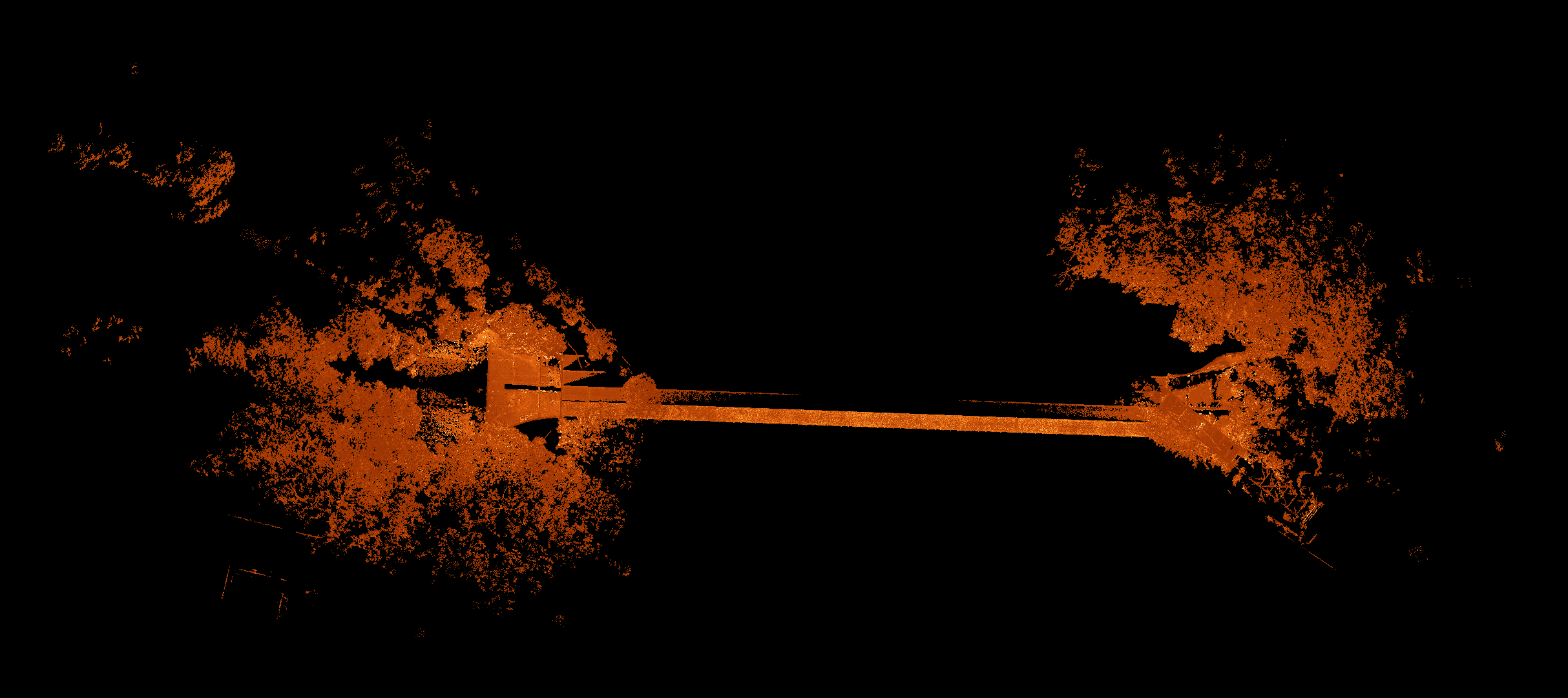
隧道内的涂鸦可以用来证明没有发生过滑坡。

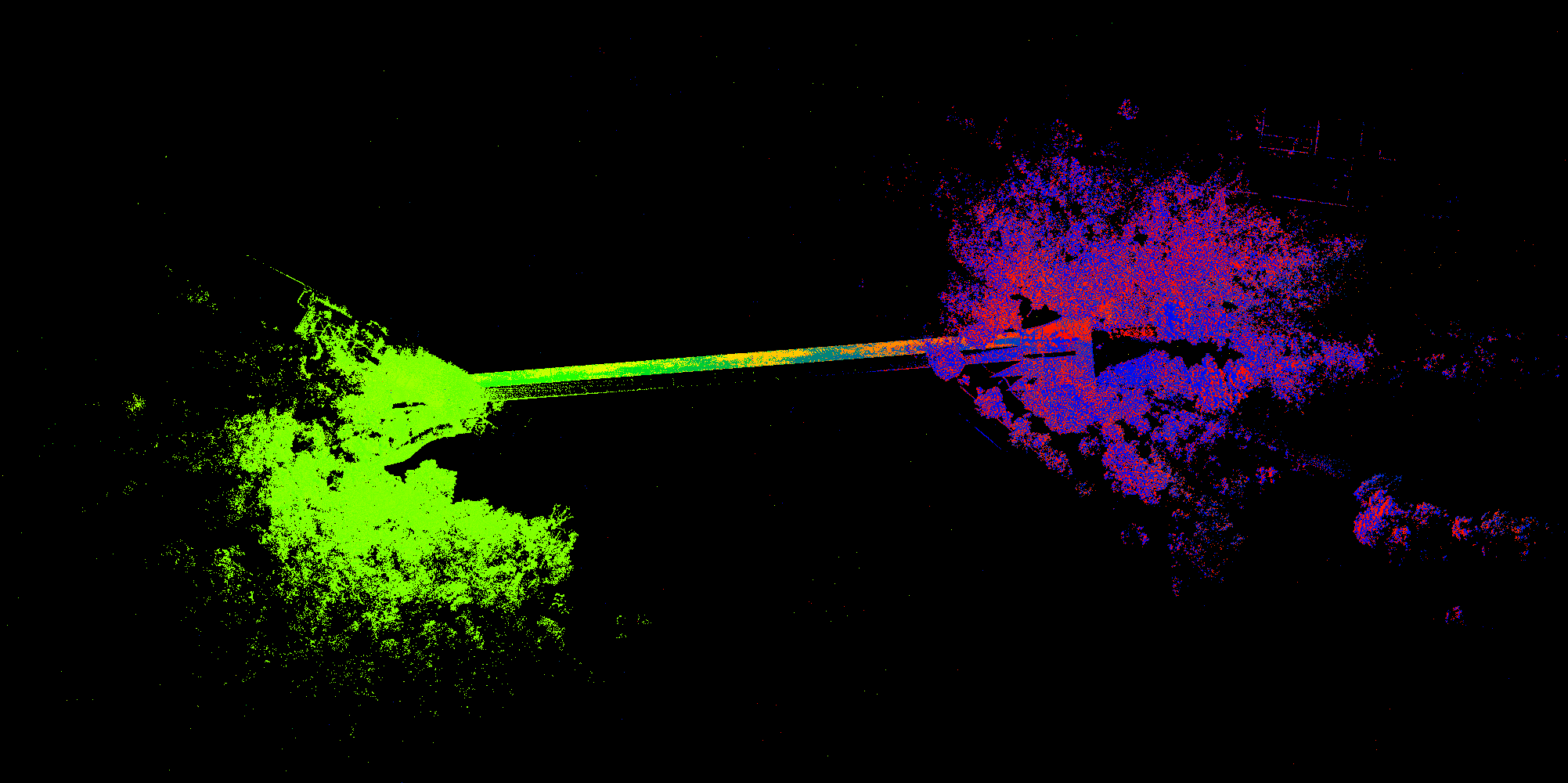
由于安装在背包上,视野受到限制,再加上后面的人增加了负面特征,因此使用默认设置进行第二次扫描时没有出现滑动。按时间给扫描着色可以突出显示SLAM 出现滑动的时间。在三色图像中,扫描从涵洞右侧开始,穿过涵洞后又返回。在返回途中,SLAM 出现了明显的滑动,因此扫描结束时与扫描开始时不一致。
该图显示了按时间(蓝色->绿色->红色)排列的扫描结果。扫描的蓝色部分和红色部分分别是起点和终点,应该对齐。

灵气处理设置
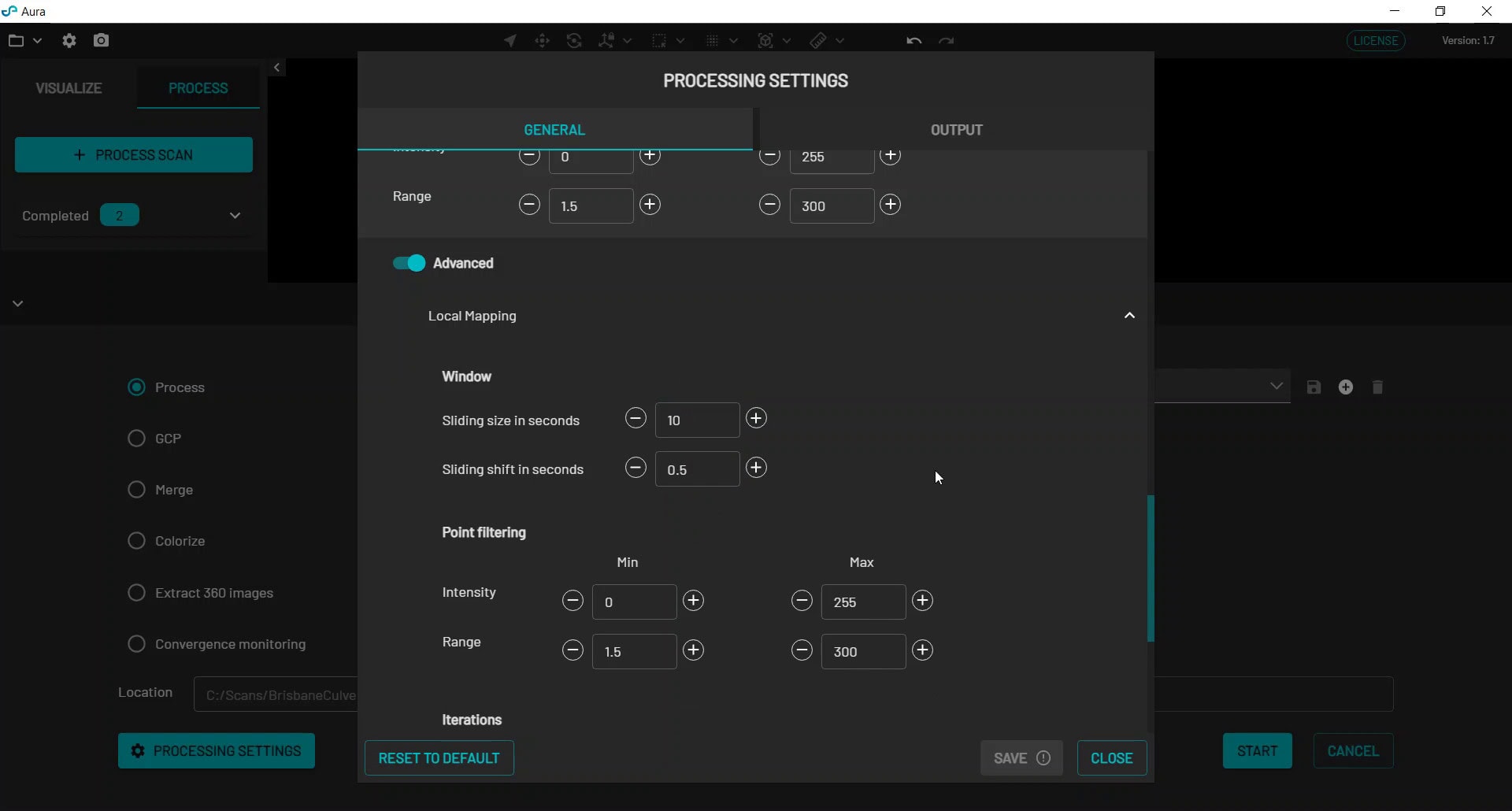
我们可以在Aura 中更改一些设置,以帮助减少滑动。
在"高级"->"本地映射"->"窗口"下,将 "滑动大小(秒)"从默认值 5 改为 10,将 "滑动移动(秒)"从默认值 1 改为 0.5。请注意,以这种方式修改这些值会使SLAM 管道的部分处理时间增加 4 至 5 倍。
修改Aura 设置后,现在扫描过程顺利进行,没有出现任何偏差,扫描的起点和终点也完全一致。
如果您需要就具有挑战性的扫描提供建议,请随时联系我们,我们随时乐意为您提供帮助。
同时,如果您想查看我们在本指南中使用的点云,可以在这里下载数据集。
