DARPA Pushing Emesent Further Into Unreachable Places
Considered the Olympics of Robotics, the DARPA SubTerranean Challenge is an autonomous robotics competition developed by the US Defence Advanced Research Project Agency (DARPA). They identified a gap in technology, seeing the need for better technology for search and rescue missions typically held in unpredictable environments, like underground. To address this, they created the competition to foster and accelerate pioneering research in underground autonomous exploration and mapping.
The competitors were made up of teams from around the world, some selected and funded by DARPA themselves. Their challenge was to use a fleet of autonomous robots to explore a variety of real-world scenarios, like urban underground, tunnel, and cave environments. The robots correctly reporting the location of trapped survivors, backpacks, and cellphones scored the teams points, and the team with the highest points would win the round.
The contest was launched in 2018, the same time that Emesent and CSIRO were working on exploring beyond visual line of sight for underground mining. Emesent and CSIRO heard of the challenge from Professor Ronald Arkin, from the Georgia Institute of Technology (Georgia Tech). They decided to combine Georgia Tech’s 20 plus years in collaborative robot development, CSIRO’s research on ground robots, and Emesent’s development of autonomous exploration and mapping in GPS-denied environments to form a team.
The first challenge was the Tunnel Circuit, held in August 2019 in tunnels of a Pittsburgh research mine. Emesent staff, researchers and engineers, headed over to Pennsylvania and joined their teammates to test their fleet of robots against hazards they would face in a real-world search and rescue exercise, like challenging terrain, physical obstacles, darkness, dust, and smoke. The robot fleet selected to face these hazards consisted of five machines.
- The BIA5 OzBot Titan, a ground based robot that moves on two caterpillar tracks.
- Bruce, CSIRO’s Data61 proprietary hexapod system that moves on six spider-like legs.
- Ghost, a quadruped robot from Vision60.
- SuperDroid Robots Inc LT2, a smaller ground based robot, also using two caterpillar tracks to move.
- Hovermap mounted on a six-rotary drone to act as the scout and to gain access to areas ground based robots can’t.
The Emesent – CSIRO Data61 – Georgia Tech team finished fifth, with a score of 7 points – enough to get them through to the next round but 18 points behind the leader, leaving plenty of room for improvement.
The entire SubT challenge was an intensive program of development and learning.
But the first challenge really gave us an understanding of what was required of us and our robot fleet.
It’s important to be agile, adaptive, and ready to change your methodology or approach when you hit a dead-end.Dr Farid Kendoul
CTO and Co Founder, Emesent & Emesent Team lead for the challenge
So, with six months to prepare, the Emesent – CSIRO Data61 – Georgia Tech team set to work adapting their robot fleet and building the technology stack in a way that allowed them to switch robots quickly and effectively.
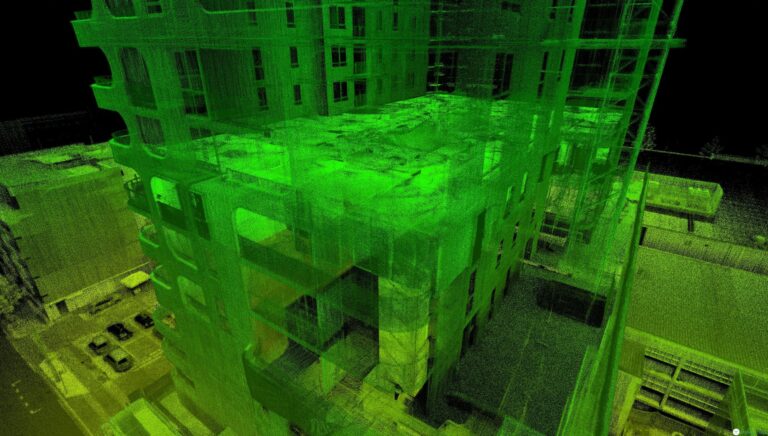
The urban circuit, the next challenge, was held in February 2020 in two courses set within an unfinished nuclear power plant in Elma, Washington. The team scored nine points in this round, putting them in fourth place, only 7 points behind the leader.
The team continued to improve their fleet and its collaboration and autonomous capabilities for the cave circuit challenge in August 2020.
Unfortunately, before much was done, the world changed, with COVID-19 being declared a pandemic by the World Health Organization and international travel practically coming to a stop.
“The cave circuit was supposed to be held in the USA but had to be modified due to COVID-19. It was run in a decentralized way, with each team creating their own event locally and sending the results back to DARPA,” explains Farid.
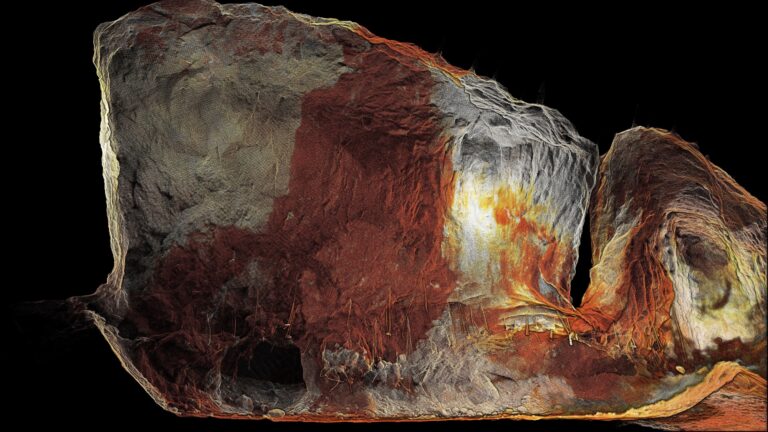
The Emesent – CSIRO Data61 – Georgia Tech team used the Chillagoe Caves, a natural cave system in far north Queensland, and got their best results yet.
“This was a turning point for us – we’d never had results like this. We got perfect data from a very challenging environment,” says Farid.
Buoyed by this result, the team continued to work towards creating the best fleet they could to compete in the final, being held in September 2021, and again impacted by COVID-19.

“Two-thirds of our team could not travel to compete in the United States because of Australia’s travel restrictions.
“This turned out to be a great benefit because the challenge was designed to send and deploy robots where it is not possible to send humans. We had to put extra effort into developing the robots that did not require much human intervention.”
Although the team had fewer humans, the robot fleet was still a strong force, made up of six robots selected for their diversity in locomotion to enable them to cover all of the challenging environments with unknown and different terrains.
- 2x legged robot, Boston Dynamics’ Spot Mini
These robots are good for narrow, urban environments and stairs. - 2x tracked vehicles, BIA5, a Brisbane-based company
These robots are good for traversing rough terrains. They also have the capacity to carry additional equipment, like the nodes for the mesh network and the drones, to preserve their battery life and position them in the best place to get good results. - 2x Hovermap-drones, Emesent
The drones can access areas ground vehicles can’t access, like stairwells, vertical shafts, and mezzanine levels.

No matter how they moved around, all of the robots had advanced autonomy and AI capabilities, including
- non-GPS navigation
- autonomous exploration
- collaboration with robot team members
- data sharing
- mapping
- cameras and other sensors for detecting artifacts
The final event was held over four days, with two preliminary rounds before the final prize round. On the first day of preliminary rounds, the Emesent – CSIRO Data61 – Georgia Tech team scored the highest number of points for that day, with seven classifications and geolocations of the artifacts. They were also one of the only teams that discovered a vertical shaft and accessed a basement level, thanks to the Hovermap equipped drones included in their fleet, and autonomously launched from the ground robots. This gave them an expanded search area compared to other teams.
In their second run, the team was able again to autonomously launch the drones to cover more area and even discovered a survivor hidden behind rocks in a dusty, small, cave-like environment.
At the end of the preliminary rounds, the Emesent – CSIRO Data61 – Georgia Tech team were in the lead, meaning they would be the last to run through the final round.
Their run went smoothly, tying for the winning place with 23 points. After a nail-biting evening, while the judges reviewed all results, they learned they had placed second – by a matter of seconds.

“This is an incredible outcome and the result of many years of hard work and collaboration by our team. A big thank you to all the people who helped with this project,” said Farid.
“We’re so proud of the contributions that Emesent has made in the last three years to advance the state-of-the-art in robotics and showcase the capabilities of Australian companies on a global stage.”
Although Emesent has deployed its Hovermap drone autonomy and mapping capability commercially since 2019, combining this with autonomous ground robot capability opens up a host of exciting and valuable future applications.
For example, drones and ground robots working together can help each other maximize the areas covered, further removing the need for human interaction.
Compared to ground robots, drones have a limited running time, but they can access elevated areas and shafts or traverse blocked or complex environments that ground robots can not. They can also help the ground vehicles by acting as a communication node and provide situational awareness to allow them to optimize their path.
The remote launch of a drone from a ground robot is fully autonomous once it has been triggered by the operator with just one click. To enable this, a very complex process has been automated. Here are just some of the complex tasks completed by the robots to ensure a successful launch:
- the ground robot stops moving and checks it is on a leveled enough terrain or with an acceptable slope
- it unlatches the drone’s security couplings
- Hovermap, the autonomy and mapping payload, is started
- Hovermap syncs and merges its data with the ground robot
- ground control station and pre-flight checks are done
- the drone is started (spinning the props)
- pre-takeoff checks are conducted
- automated takeoff is initiated
- autonomous drone exploration is started
- the ground robot reconfigures itself and resumes its mission
“Having a fleet of driving, walking, and flying robots that are achieving complex missions autonomously and collaboratively is a major technological milestone and an important step towards using autonomous systems for saving lives and helping people,” said Farid.
“We’ll continue to push the boundaries of GPS-denied autonomy and mapping at Emesent, and we’re excited to see this have further impact in many industries.”Dr Farid Kendoul
CTO and Co Founder, Emesent & Emesent Team lead for the challenge

The DARPA SubTerranean Challenge allowed Emesent to advance their technology’s autonomous capabilities in exploration and mapping in underground environments. Hear how from Emesent’s CTO and Co Founder, Dr Farid Kendoul in this webinar.
Related Resources