Superior measurement speed is a great benefit of Simultaneous Localization and Mapping (SLAM) scanners, especially in enclosed spaces. But how does SLAM fare against terrestrial static scanners in this environment? A team from the Department of Special Geodesy at the Czech Technical University in Prague put it to the test in a 120 meter long mining tunnel.
In this study, the researchers developed a method to evaluate the accuracy of two types of scanners, static and SLAM, in the rugged conditions of mine tunnels. They tested two static scanners - the Trimble X7 and Faro Focus - against four SLAM scanners from NavVis, GeoSLAM, Faro and Emesent, to compare their performance. All of the SLAM-based scanners were measured on two way scanning results ie. from the start to the end of the tunnel and back again, with the exception of Emesent 1. Surprisingly, some of the newer SLAM scanners performed comparably to or better than the static scanners, particularly in terms of overall accuracy, even though the resultant point clouds tended to have more noise. Despite this, noise could be reduced effectively through smoothing, though some surface details may be lost in the process. The SLAM scanners also had the advantage of collecting more complete point clouds as they do not suffer as much from shadowing as static scanners, which require a large number of scans in order to minimize gaps in the point cloud.
In the accuracy characteristic best describing the real-world application, i.e., the overall accuracy of the point cloud, one standout result was the latest SLAM scanner from Emesent, the Hovermap STX, which achieved better accuracy than the tested static scanners. While these findings apply mainly to rugged environments like mine tunnels, the study’s workflow may be adapted to assess scanner performance in other settings as well.
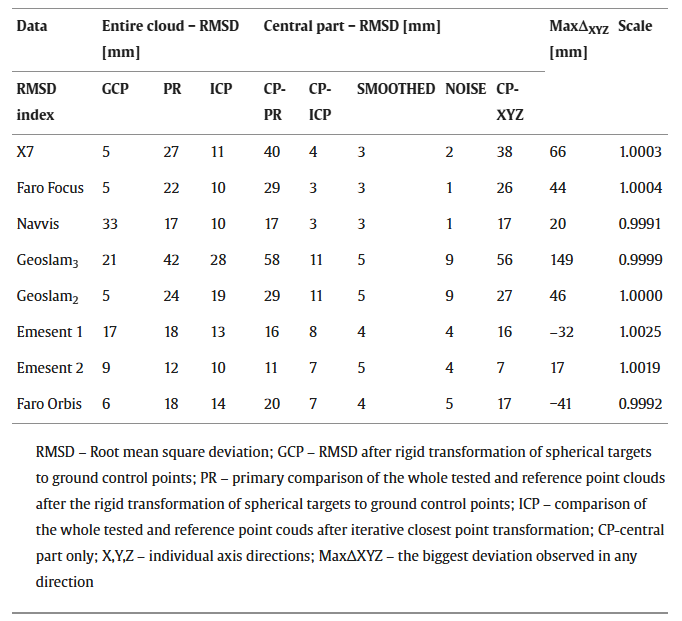
A summary of the findings is shown below. The RMSD CP-XYZ – Root Mean Square Deviation (RMSD) of systematic errors in all directions from all measurements using the individual scanner, and MAXΔXYZ, i.e., the single highest systematic error in any direction found over the three repetitions for each individual scanner, are probably the most important parameters for practical application as they indicate the maximum systematic inaccuracy of the scanner.